


Design and Verification of Scientific Exploration Mode of Zhurong Mars Rover
-
摘要: 受通信能力低、能源不足等限制,祝融号火星车有效载荷科学探测需提高探测效率,以有限资源获取尽可能多的有效探测数据。祝融号火星车的巡视探测科学任务着眼于火星局部地区,包括火星车行驶时载荷探测和火星车停止时定点就位载荷探测两个主要工况。统筹考虑祝融号火星车移动能力、通信能力、能源能力、热控能力等约束,合理划分工程活动和科学探测活动可用的资源,协调使用火星车的桅杆和移动系统,优化组合各载荷工作模式,设计了高效载荷探测模式。该探测模式与基于工作模式表的自主探测控制方式相结合,解决了资源受限情况下的多载荷协同探测难题。祝融号火星车有效载荷系统圆满完成了预期探测任务,设计的科学探测模式全部得到在轨验证。结果表明这些模式设计合理有效,满足安全、自主、高效开展科学探测的需求。Abstract: The Zhurong Mars rover conducts high resolution in situ surveys in a critical area of Mars. The scientific payloads mounted on the rover include: Navigation and Terrain Camera (NaTeCam), Multispectral Camera (MSCam), Mars Rover Penetrating Radar (RoPeR), Mars Surface Composition Detector (MarSCoDe), Mars Rover Magnetometer (RoMAG) and Mars Climate Station (MCS). Their scientific exploration tasks include studying topography and geological structure of the Mars roving area; surveying the soil structure (profile) of the Mars roving area and searching for water ice; surveying elements, minerals, and rock types of the Mars roving area; and surveying the atmosphere physical characteristics and the surface environment of the Mars roving area. To obtain as much exploration data as possible with limitations on low communication capability and insufficient energy, it is necessary to improve scientific exploration efficiency of the Zhurong Mars rover. There are two major operating conditions for the payloads, conducting roving exploration when the rover moves and in-situ exploration when the rover stops. Several high-efficiency payload exploration modes are developed for those two conditions. When designing the exploration modes, some aspects need to be considered. The first aspect is myriad of constraints, including rover resources and safety, the Martian environment, telecommunication, and the limitations of the software, hardware, and processes involved. The second, the rover is a shared resource: a variety of science and engineering activities must divide the available energy, time, and transmitted data volume, and must coordinate the use of the rover’s mast and mobility systems. The third point is that each payload has multiple operating modes that must be optimized and combined. The exploration modes, working with autonomous control based on work mode command set, solved the problem of multiple payloads performing collaborative scientific exploration under resource shortage conditions. The Zhurong Mars rover has successfully completed the scheduled exploration mission. All scientific exploration modes have been verified. The results demonstrate that the exploration modes are suitable and effective, and can meet the requirements for conducting safe, autonomous, and efficient scientific exploration.
-
Key words:
- Zhurong Mars rover /
- Payload /
- Scientific exploration process /
- Roving exploration /
- In situ exploration
-
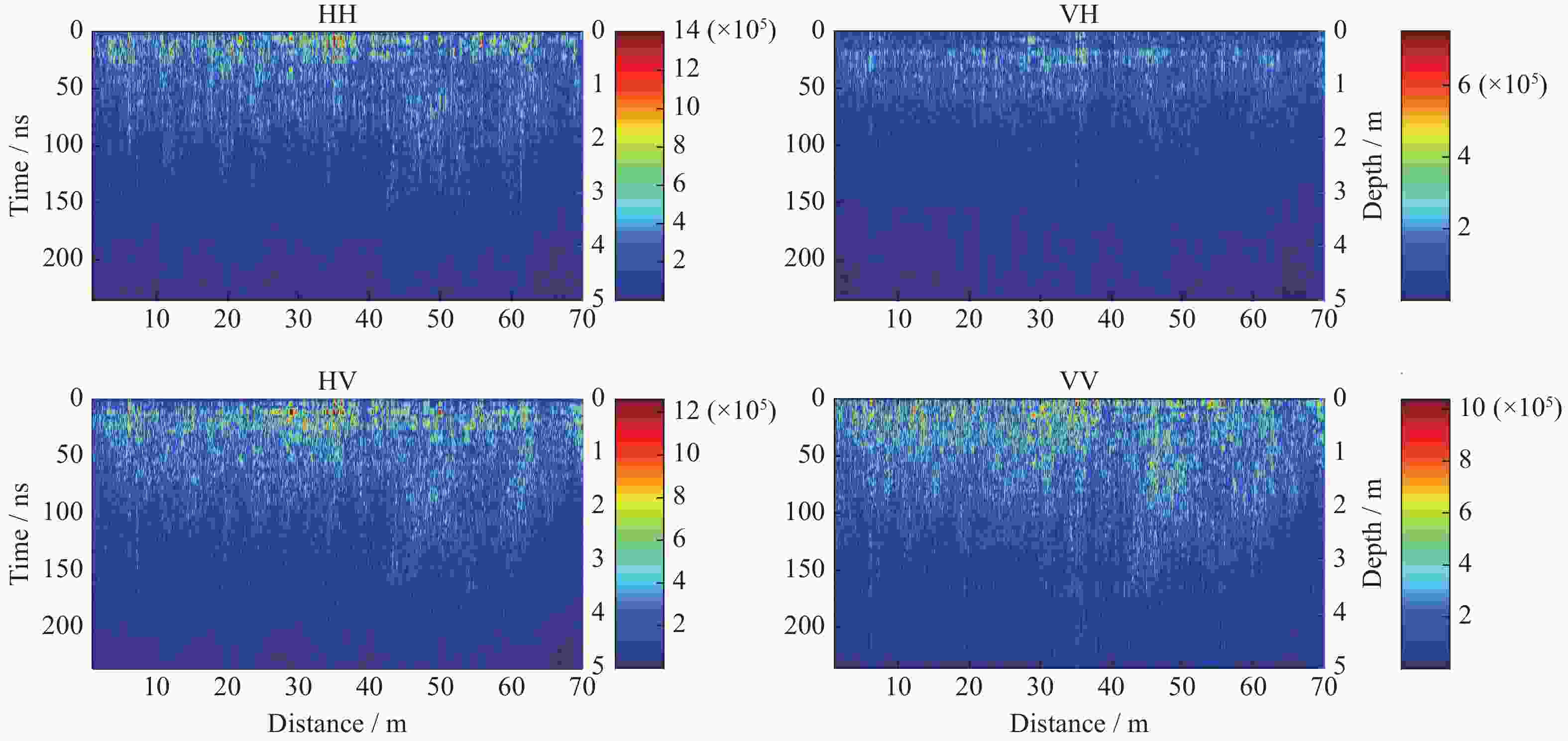
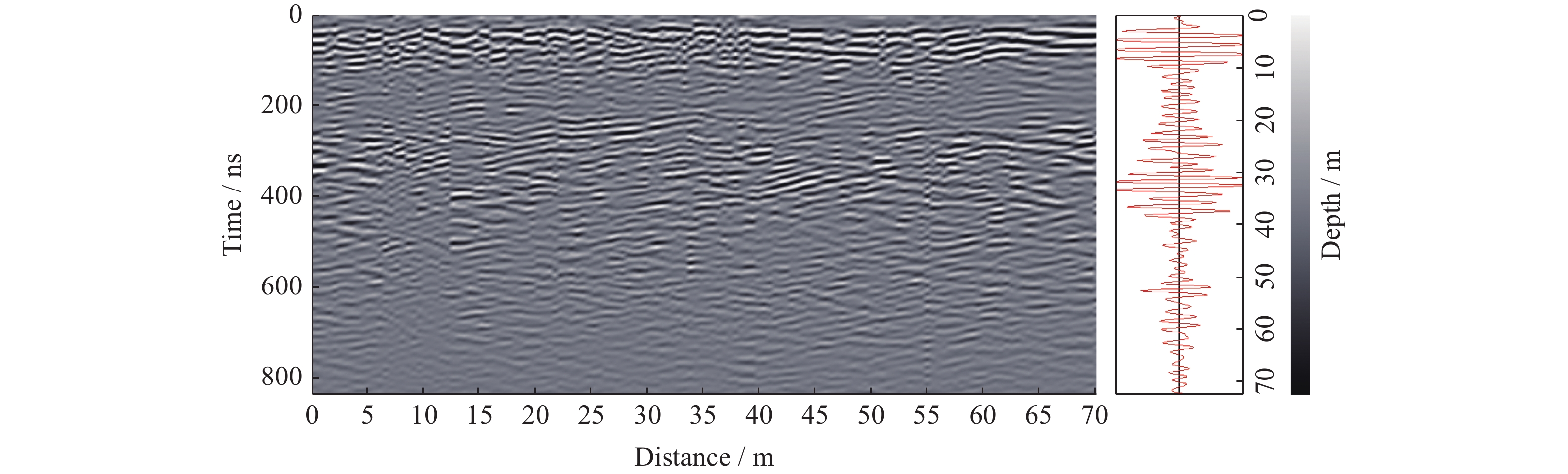
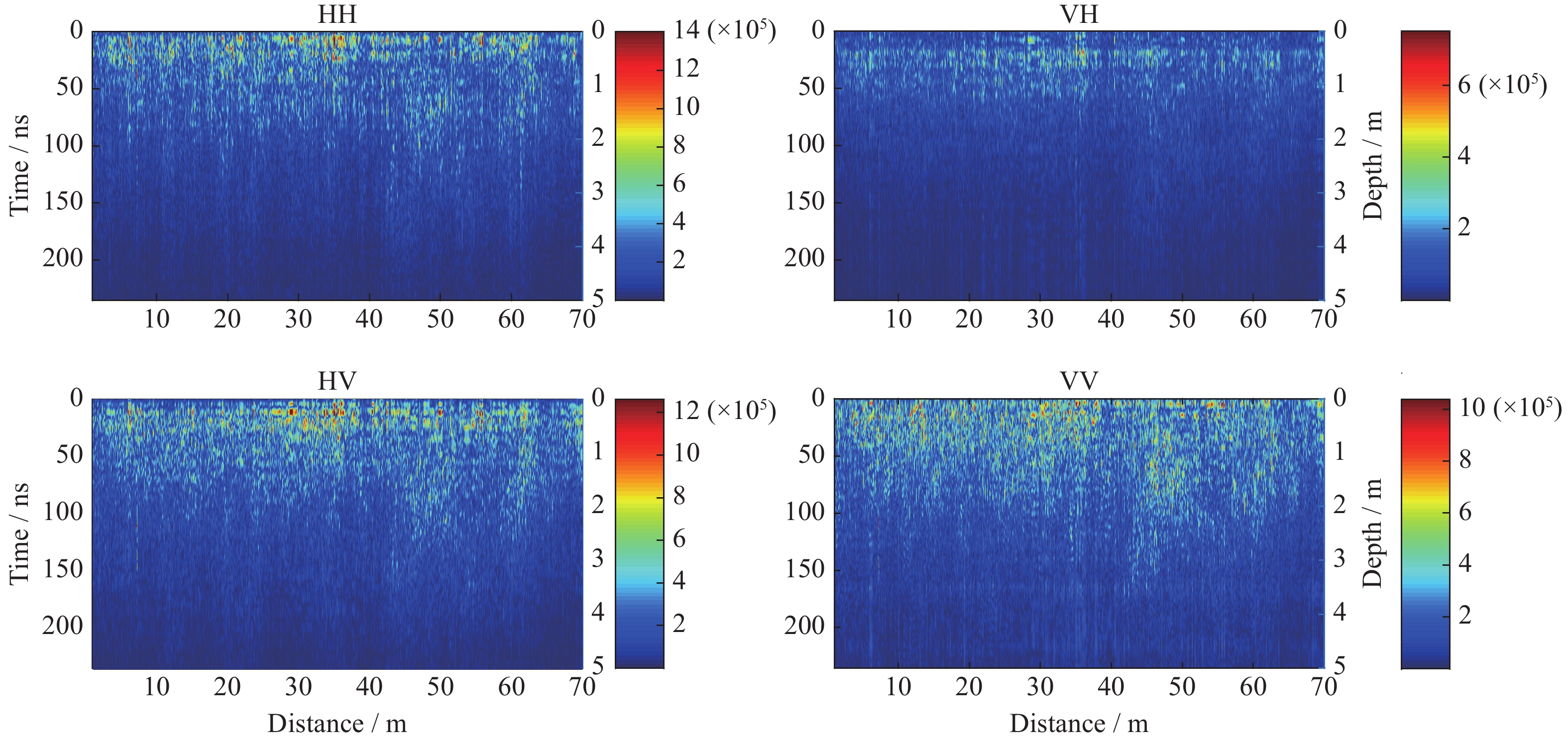
图 7 高频通道70 m探测结果(色条表示目标反射电磁波的相对能量)
Figure 7. Measuring result of high frequency channel 70 m (The color bar represents the relative energy value of the electromagnetic waves reflected by the target)

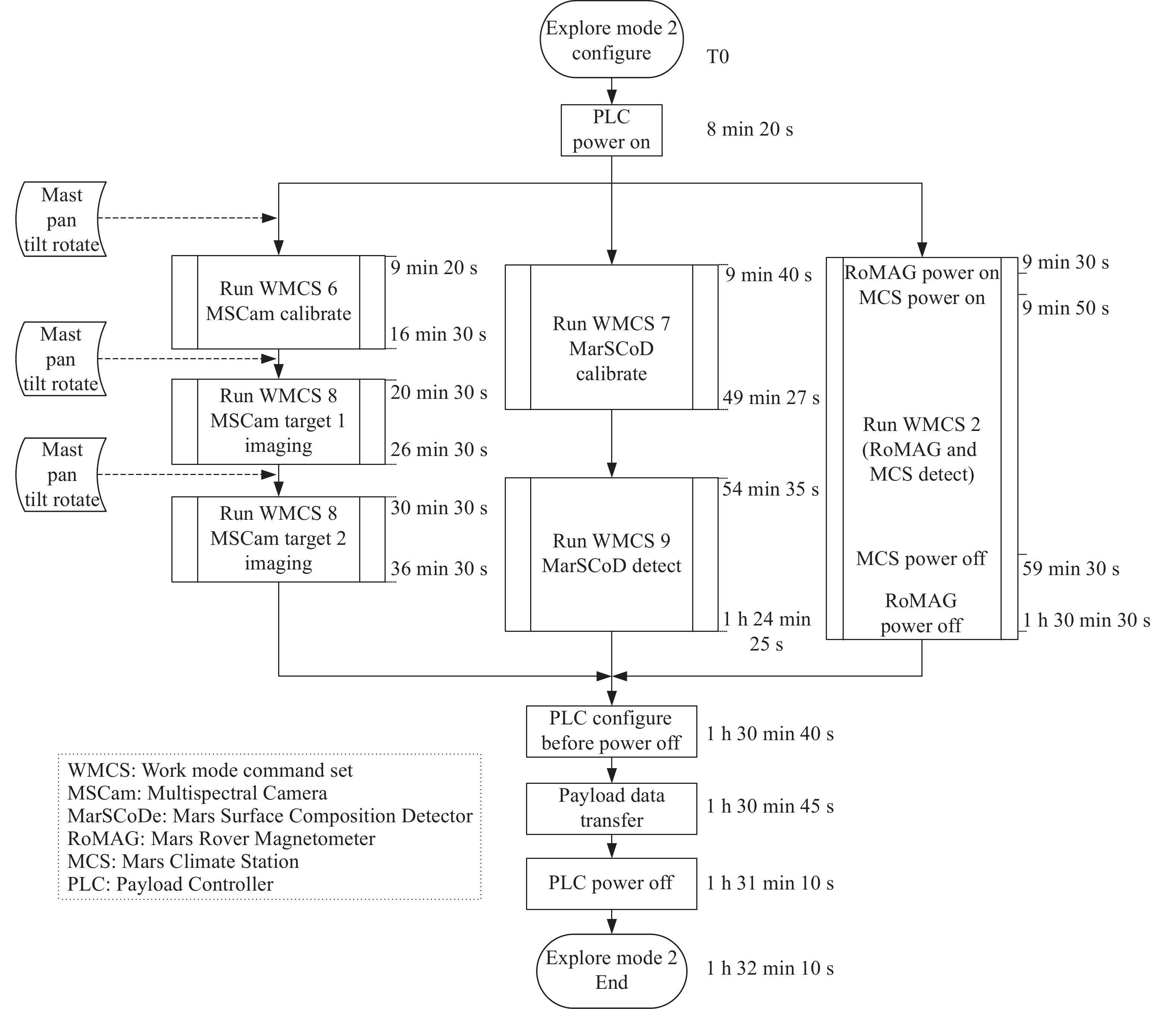
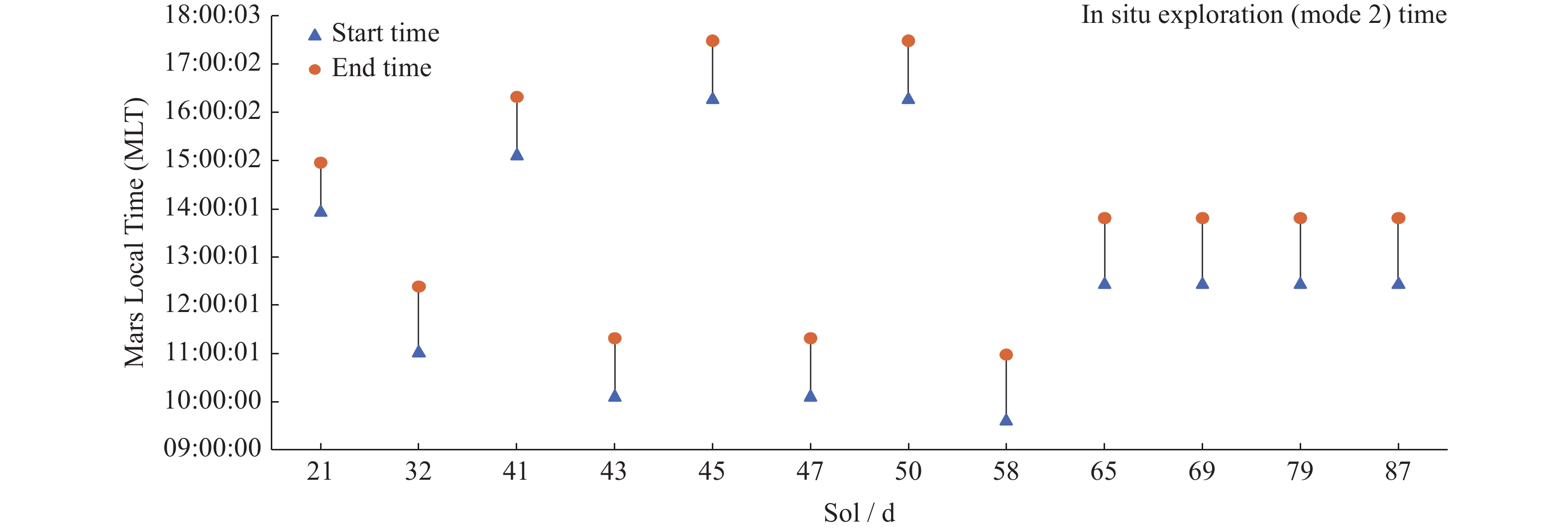
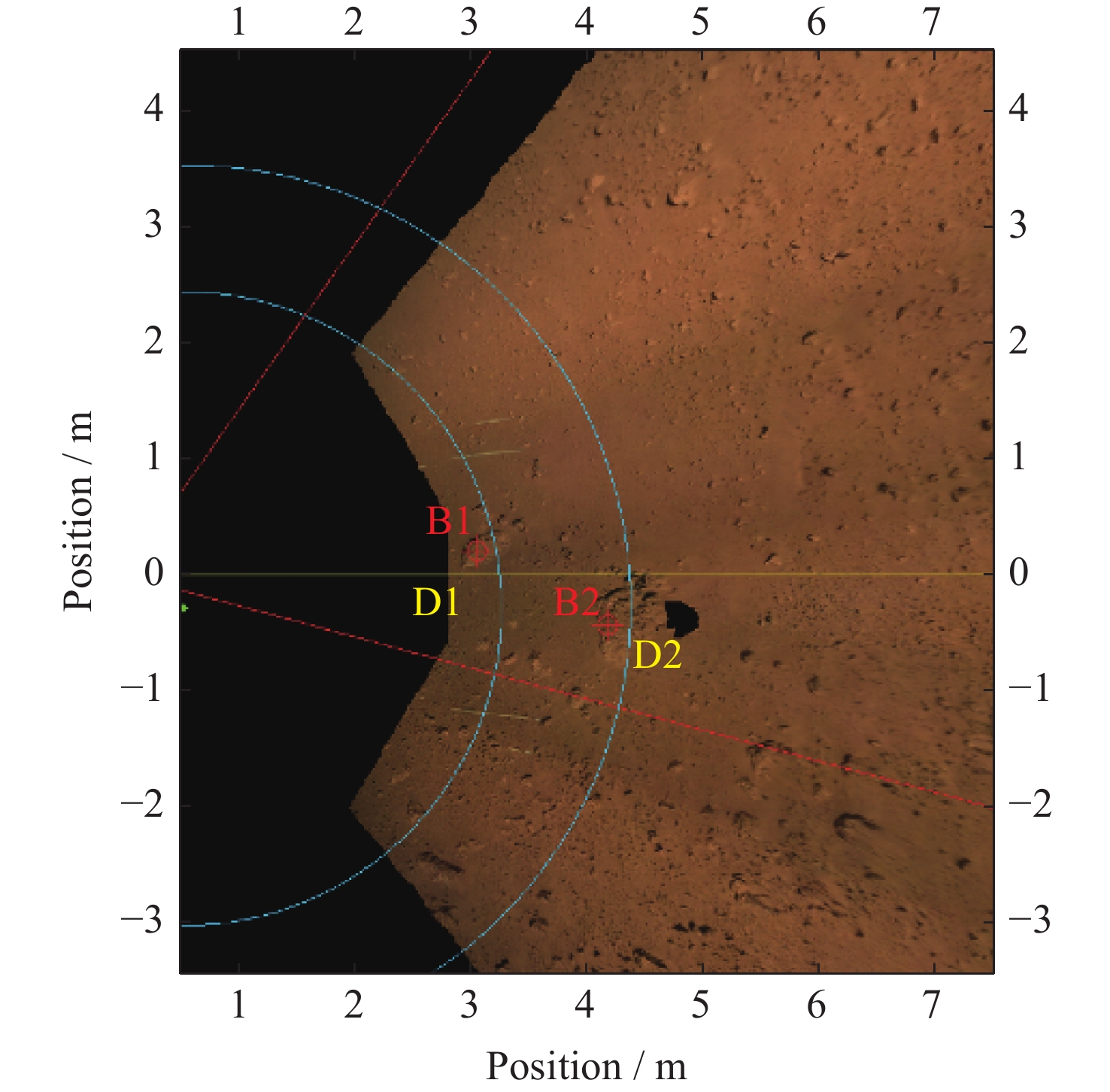
图 8 探测模式2选取的探测目标(图片来源:中国科学院国家天文台)
Figure 8. Target selected in exploration mode 2 (Picture source: NAOC)

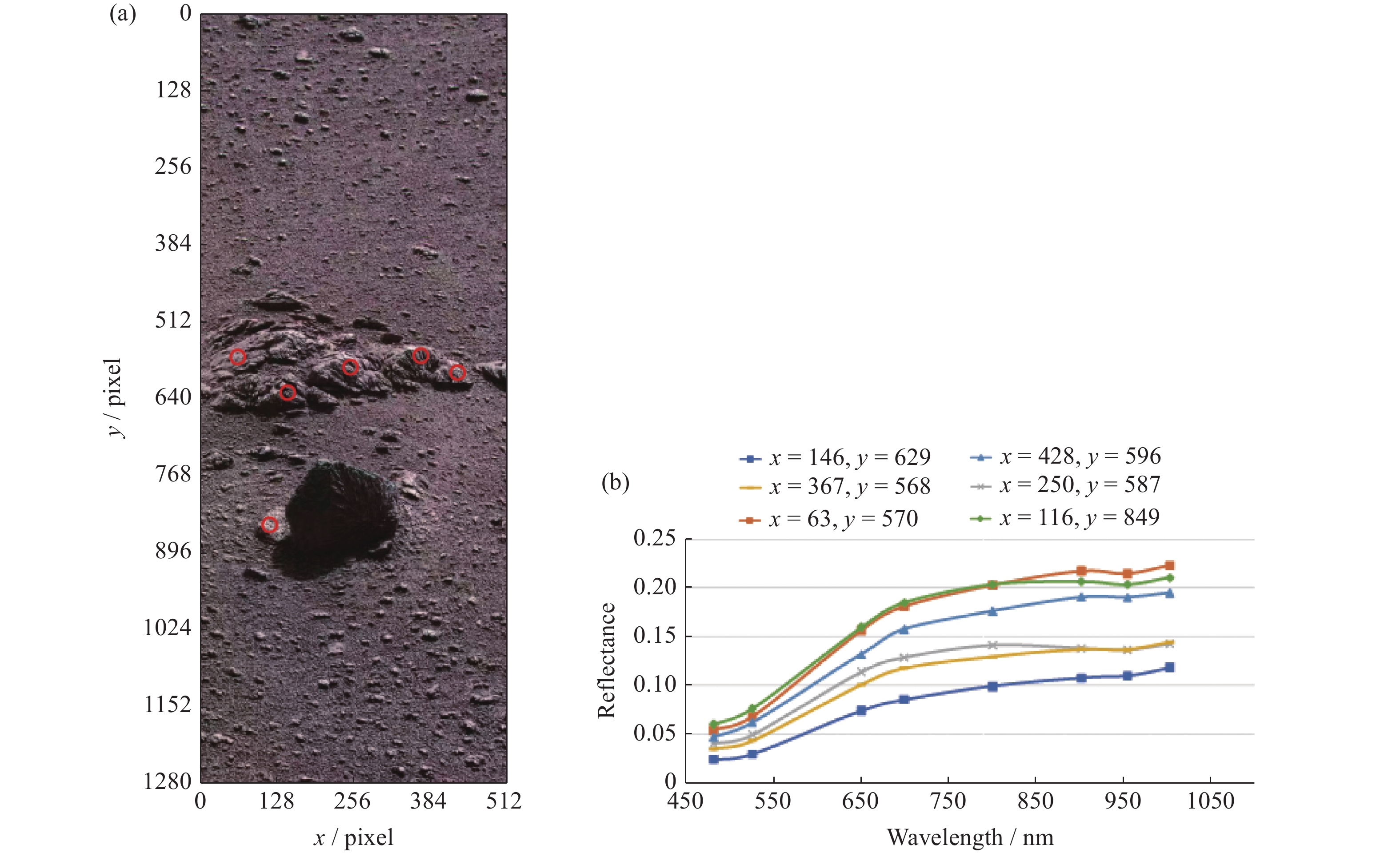
图 9 多光谱相机拍摄的岩石及光谱反射率曲线
Figure 9. Rock and spectral reflectance curves taken by Multispectral Camera
表 1 有效载荷工作条件约束矩阵
Table 1. Constraint matrix of payload working condition
火星车运动状态 火星车位置、朝向 火星车桅杆云台 多光谱相机 静止 接近和朝向探测目标,距离目标大于1.5 m 桅杆云台转动,使多光谱相机指向目标 次表层探测雷达 行驶 无约束 无约束 表面成分探测仪 静止 接近和朝向探测目标,距离目标2~5 m,目标在其二维指向镜指向范围内,太阳高度角不小于30° 无约束 表面磁场探测仪 静止 无约束 桅杆云台处于零位 气象测量仪 行驶和静止都可 无约束 桅杆云台处于零位  下载: 导出CSV
下载: 导出CSV
表 2 有效载荷典型探测模式
Table 2. Payload typical exploration mode
飞行
阶段对应飞行
程序多光谱
相机次表层
探测雷达表面成分
探测仪磁场
探测仪气象
测量仪时长 数据量 释放
分离第8个火星日,探测模式1 × × × × 机动测量模式(声音) 根据火星车移动时间 约12 Mbit(移动10 m时) 第11、14
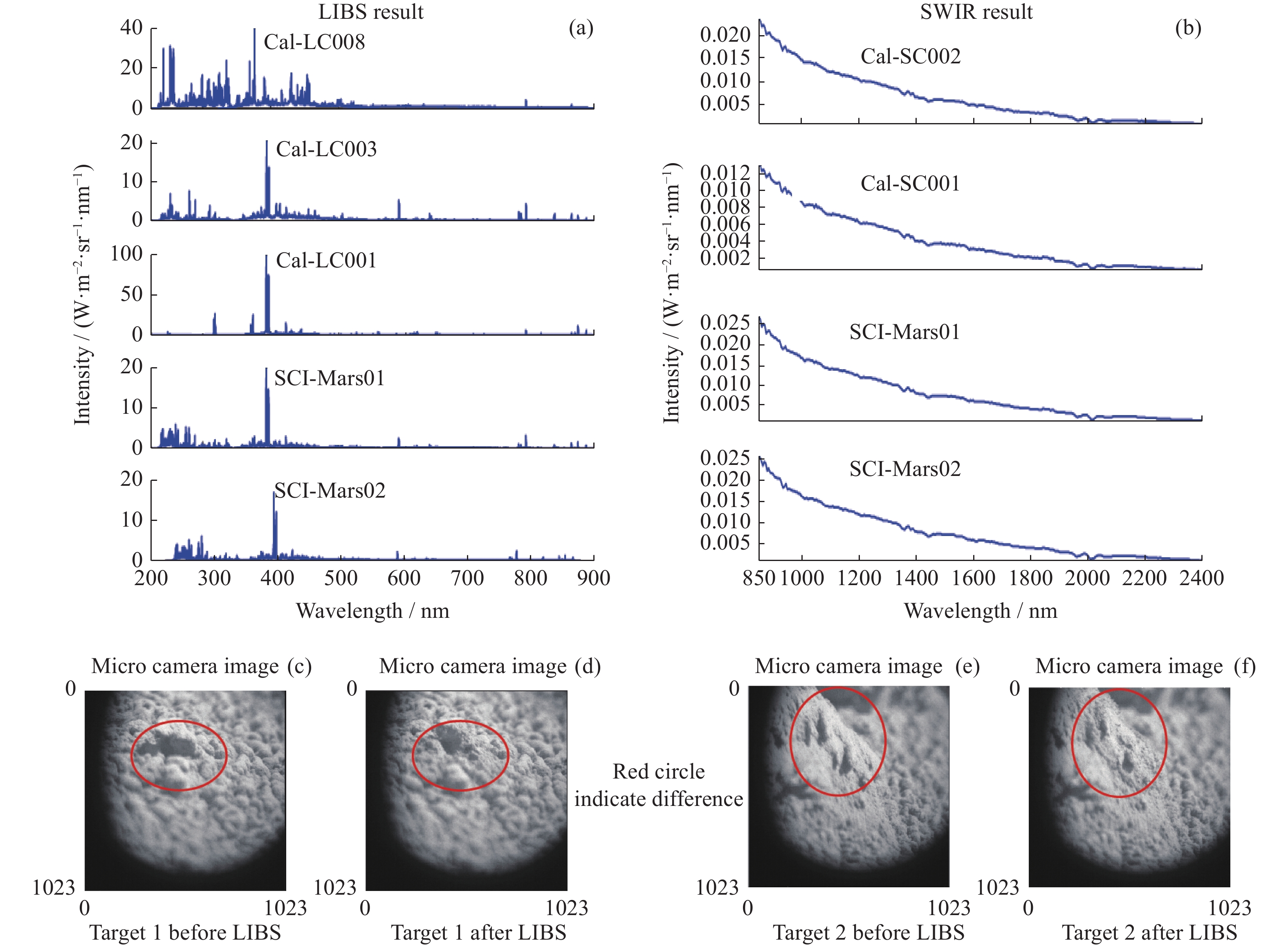
个火星日,移动模式× 定距离触发模式 × × 常规测量模式1(气温气压风场) 根据火星车移动时间 约12 Mbit(移动10 m时) 火面科学探测 火星车移动时,移动模式探测 × 定距离触发模式 × 正常采样模式(火星车移动结束后) 机动测量模式(气温气压风场) 根据火星车移动时间 约28 Mbit(移动20 m时) 火星车静止时,探测模式2探测 对标定板和前方2个目标进行8谱段拍照 × 3个LIBS标样在轨定标,2个短波标样在轨定标;对2个目标进行LIBS光谱采集模式、显微成像、被动短波红外光谱采集模式 正常采样模式 机动测量模式(气温气压风场声音) 91 min 185 Mbit
(多光谱相机图像114 Mbit,其他载荷约71 Mbit)火星车静止时,探测模式3探测 × × × 正常采样模式 机动测量模式(气温气压风场声音) 82 min 约5 Mbit 注 × 表示该载荷不工作。
下载: 导出CSV
表 3 设计寿命期内使用的模式表
Table 3. Working mode table used during the nominal mission period
名称 说明 模式表
执行时长应用的
探测模式模式表0 空表 - 暂未使用 模式表1 气象测量仪探测 5 min 15 s 移动模式 模式表2 气象测量仪和磁场测量仪探测 81 min 探测模式2、3 模式表3 雷达探测状态设置 22 s 移动模式 模式表4 地火转移自检 16 min 35 s 地火转移自检 模式表5 释放分离自检 17 min 29 s 释放分离自检 模式表6 多光谱相机定标 7 min 10 s 探测模式2 模式表7 表面成分探测仪定标 39 min 47 s 探测模式2 模式表8 多光谱相机探测 6 min 探测模式2 模式表9 表面成分探测仪探测 29 min 50 s 探测模式2
下载: 导出CSV
-
[1] ZOU Y L, ZHU Y, BAI Y F, et al. Scientific objectives and payloads of Tianwen-1, China’s first Mars exploration mission[J]. Advances in Space Research, 2021, 67(2): 812-823 doi: 10.1016/j.asr.2020.11.005 [2] LI C L, ZHANG R Q, YU D Y, et al. China’s Mars exploration mission and science investigation[J]. Space Science Reviews, 2021, 217(4): 57 doi: 10.1007/s11214-021-00832-9 [3] GROTZINGER J P, CRISP J, VASAVADA A R, et al. Mars science laboratory mission and science investigation[J]. Space Science Reviews, 2012, 170(12/3/4): 5-56 [4] VASAVADA A R. Mission overview and scientific contributions from the Mars Science Laboratory Curiosity Rover after eight years of surface operations[J]. Space Science Reviews, 2022, 218(3): 14 doi: 10.1007/s11214-022-00882-7 [5] 张荣桥. 中国首次火星探测工程[M]. 北京: 中国宇航出版社, 2021ZHANG Rongqiao. China First MARS Exploraton Project[M]. Beijing: China Astronautic Publishing House, 2021 [6] 孙泽洲, 陈百超, 贾阳, 等. 天问一号火星巡视探测技术[J]. 中国科学:技术科学, 2022, 52(2): 214-225 doi: 10.1360/SST-2021-0487SUN Zezhou, CHEN Baichao, JIA Yang, et al. The Tianwen-1 roving exploration technology for the martian surface[J]. SCIENTIA SINICA Technologica, 2022, 52(2): 214-225 doi: 10.1360/SST-2021-0487 [7] 张辉, 卢皓, 于天一, 等. “祝融号”火星车遥操作技术[J]. 深空探测学报(中英文), 2021, 8(6): 582-591ZHANG Hui, LU Hao, YU Tianyi, et al. Teleoperation technology of Zhurong Mars Rover[J]. Journal of Deep Space Exploration, 2021, 8(6): 582-591 [8] 孙泽洲, 韩宇, 白帆, 等. 天问一号火星探测器多节点、多体制中继通信系统设计与验证[J]. 中国科学:技术科学, 2022, 52(2): 226-236 doi: 10.1360/SST-2021-0484SUN Zezhou, HAN Yu, BAI Fan, et al. Design and verification of the multinode and multisystem relay communication system for the Tianwen-1 Mars Probe[J]. SCIENTIA SINICA Technologica, 2022, 52(2): 226-236 doi: 10.1360/SST-2021-0484 [9] 王连国, 朱岩, 马苗, 等. 适用于行星巡视探测的集中式载荷控制方法[J]. 国防科技大学学报, 2019, 41(2): 8-16 doi: 10.11887/j.cn.201902002WANG Lianguo, ZHU Yan, MA Miao, et al. Centralized payload control method for planetary rover exploration[J]. Journal of National University of Defense Technology, 2019, 41(2): 8-16 doi: 10.11887/j.cn.201902002 [10] 张荣桥, 耿言, 孙泽洲, 等. 天问一号任务的技术创新[J]. 航空学报, 2022, 43(3): 326689ZHANG Rongqiao, GENG Yan, SUN Zezhou, et al. Technical innovations of the Tianwen-1 mission[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(3): 326689 [11] AGRAWAL J, YELAMANCHILI A, CHIEN S A. Using explainable scheduling for the Mars 2020 rover mission[OL]. arXiv preprint arXiv: 2011.08733, 2020 [12] KUHN S. From determinism to emergence: systems engineering a step change in execution on Mars[C]//Proceedings of the 2019 IEEE Aerospace Conference. Big Sky: IEEE, 2019 -
-

 下载:
下载:

计量
- 文章访问数: 1049
- HTML全文浏览量: 332
- PDF下载量: 121
-
被引次数:
0(来源:Crossref)
0(来源:其他)

