


A Method for Estimating Differential Code Deviation of Ground-based GNSS Receiver
-
摘要:
GNSS不同频点间的码伪距作差会引入信号的差分码偏差(DCB),包括GNSS卫星及地面接收机的DCB。本文提出一种地基GNSS接收机差分码偏差参数估算方法,首先由电离层文件参数作线性插值,计算出电离层延迟误差。之后对IGS站观测文件进行加权最小二乘法估计,得到GPS卫星和地面GNSS接收机的L1C频点和L2P频点间码偏差。该方法能同时获取卫星DCBs与地面GNSS接收机的DCBr,有效解决地面GNSS接收机DCBr获取的问题。通过对估计的卫星DCBs与CODE公布的值进行对比和统计分析,结果表明,两者卫星DCBs(C1P2)之差的RMS均值误差 < 0.3541 ns,地基GNSS接收机DCBr(C1P2)估算精度优于1.6105 ns。
Abstract:The difference of code pseudo-range between different frequency points of GNSS will lead to the DCB of the signal. The DCB of GNSS satellite and ground receiver can cause an accuracy error of about 25 ns, which must be corrected. Against to this problem, this paper proposes a differential code deviation estimation method for ground-based GNSS receivers. This method can obtain the DCBr of ground GNSS receiver and satellite DCBs at the same time, and effectively solve the problem of ground GNSS receiver DCBr acquisition. Through the comparison and statistical analysis of the estimated satellite DCBs and the values published by code, the results show that the RMS mean error of the difference between the two satellites DCBs (C1P2) is less than 0.3541 ns, and the estimation accuracy of ground-based GNSS receiver DCBr (C1P2) is better than 1.6105 ns.
-
Key words:
- Differential code bias /
- satellite DCBs /
- receiver DCBr /
- Parameter estimation
-
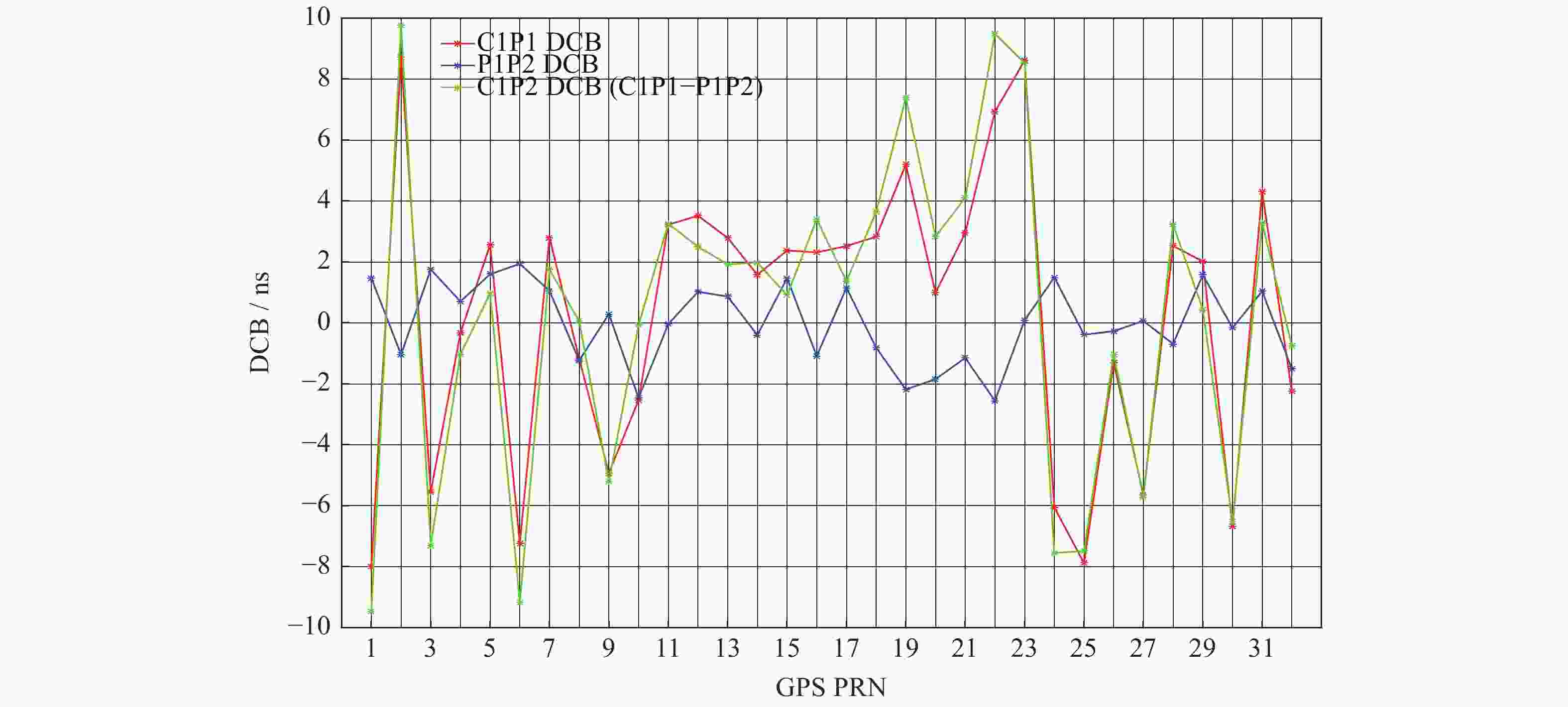
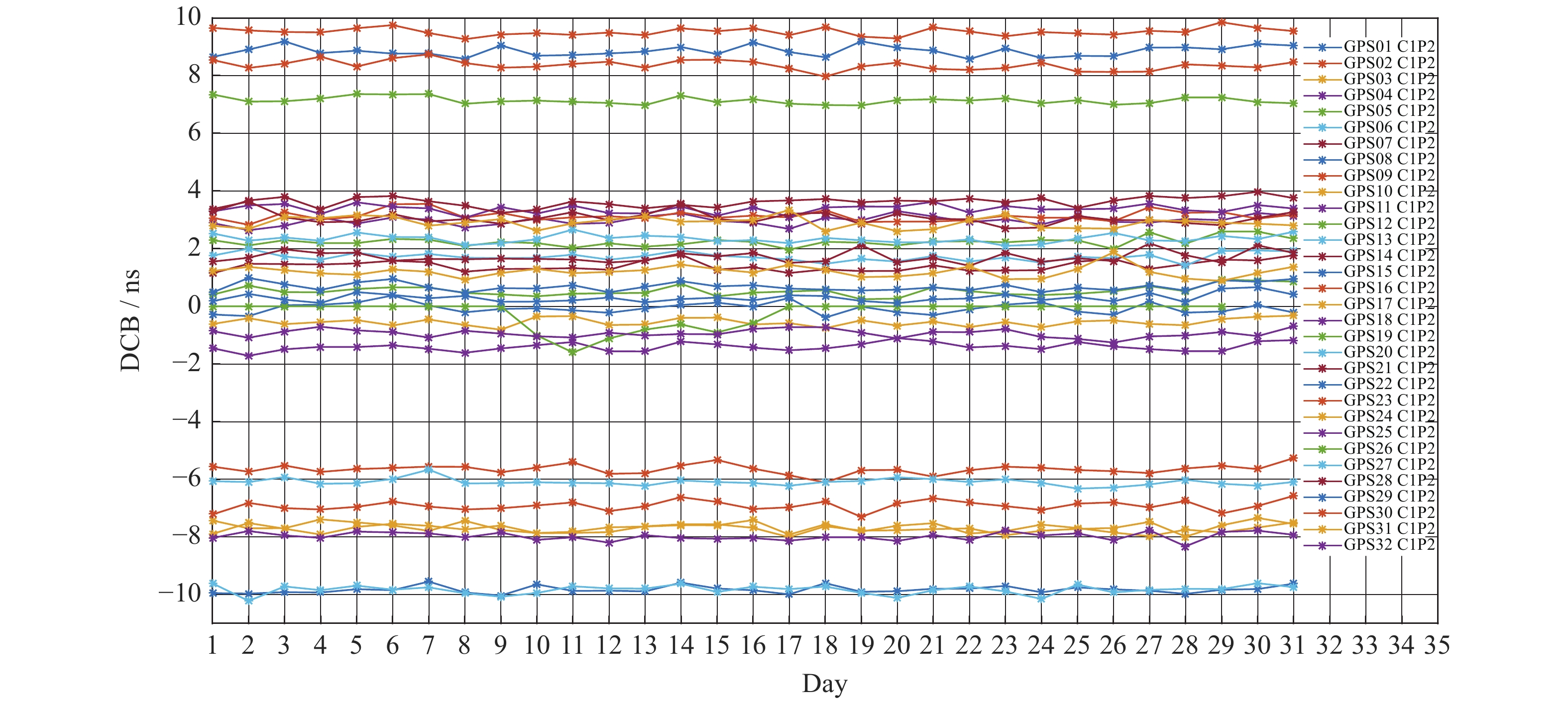
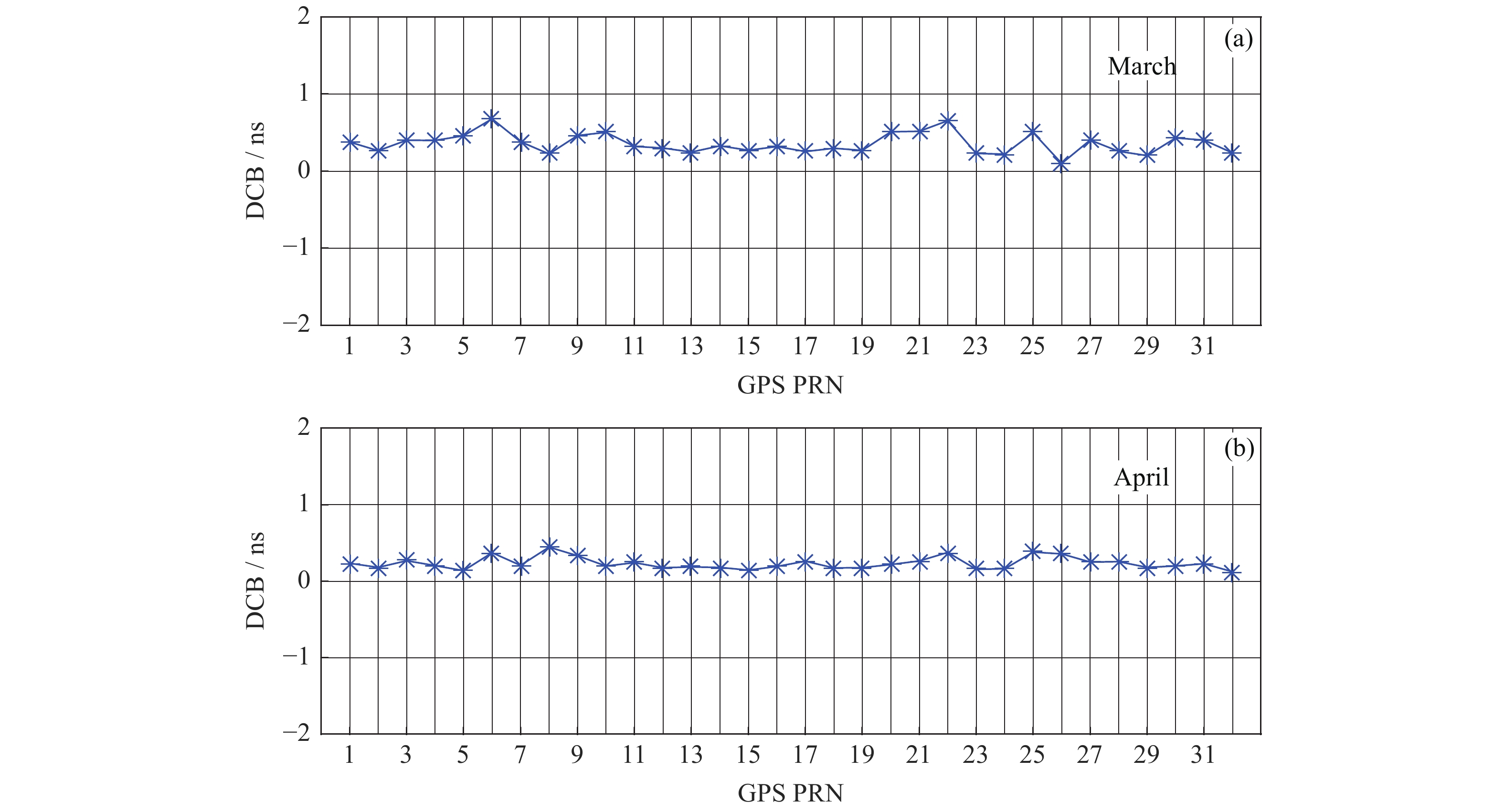
图 2 CODE中心下载的2015年3月DCB数据
Figure 2. DCB data for March 2015 downloaded from CODE Center
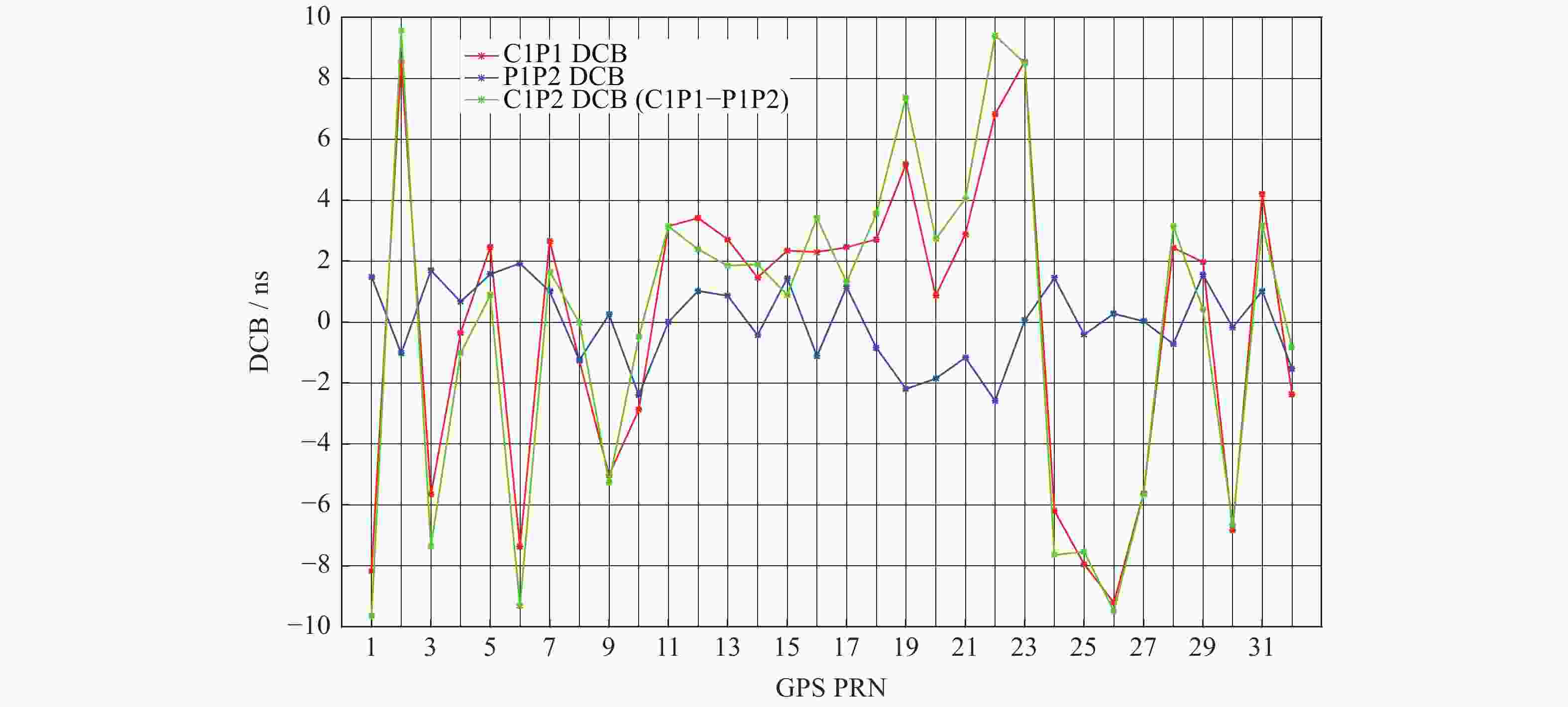
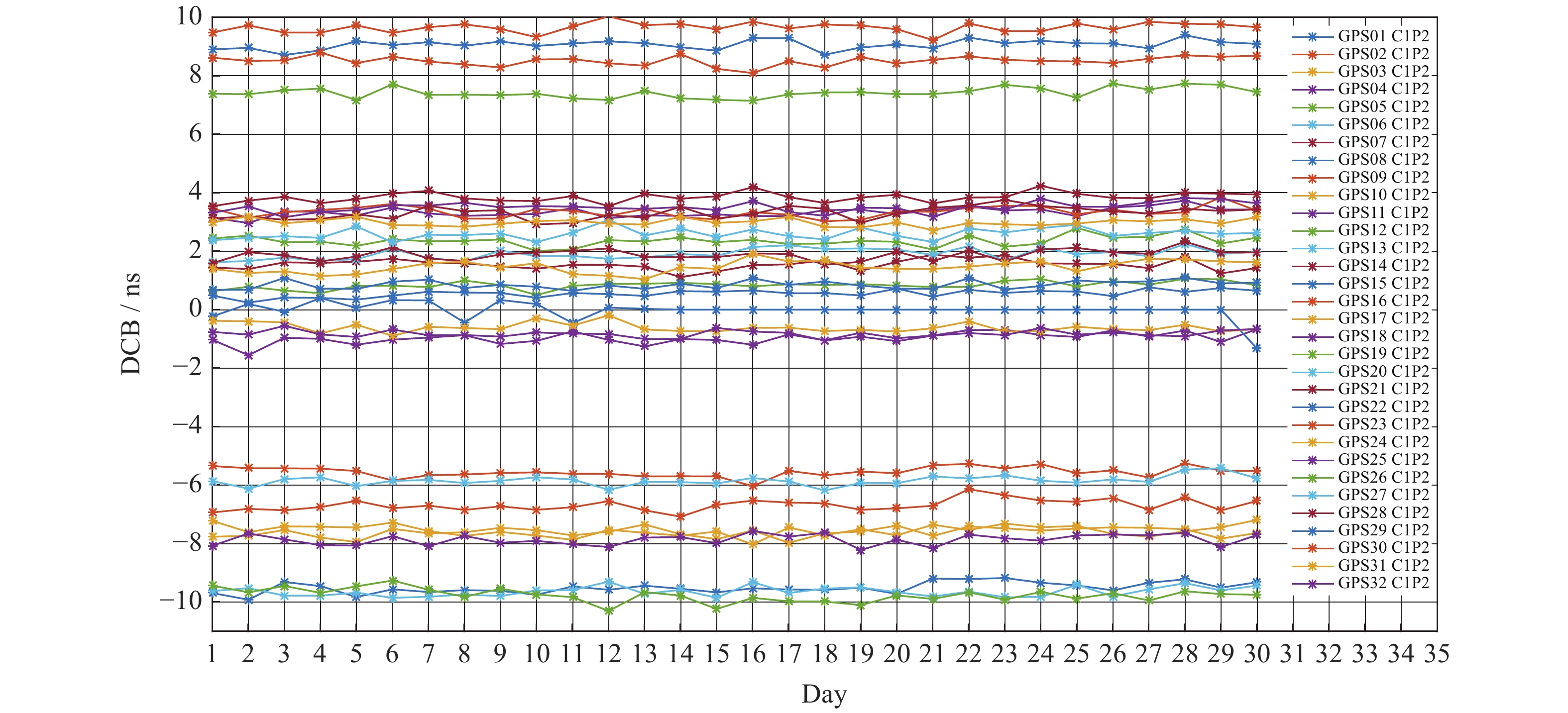
图 3 CODE中心下载的2015年4月DCB数据
Figure 3. DCB data for April 2015 downloaded from CODE Center
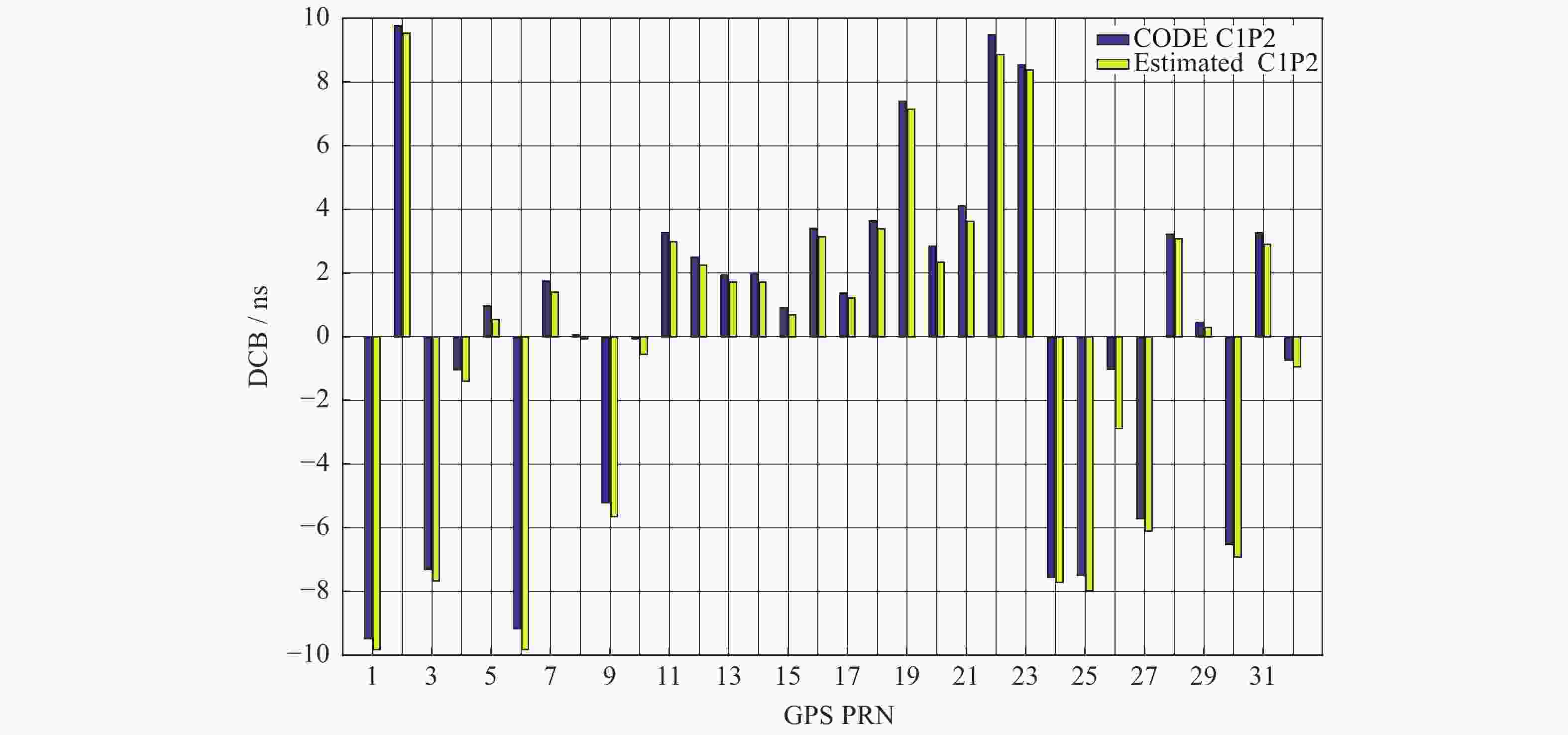
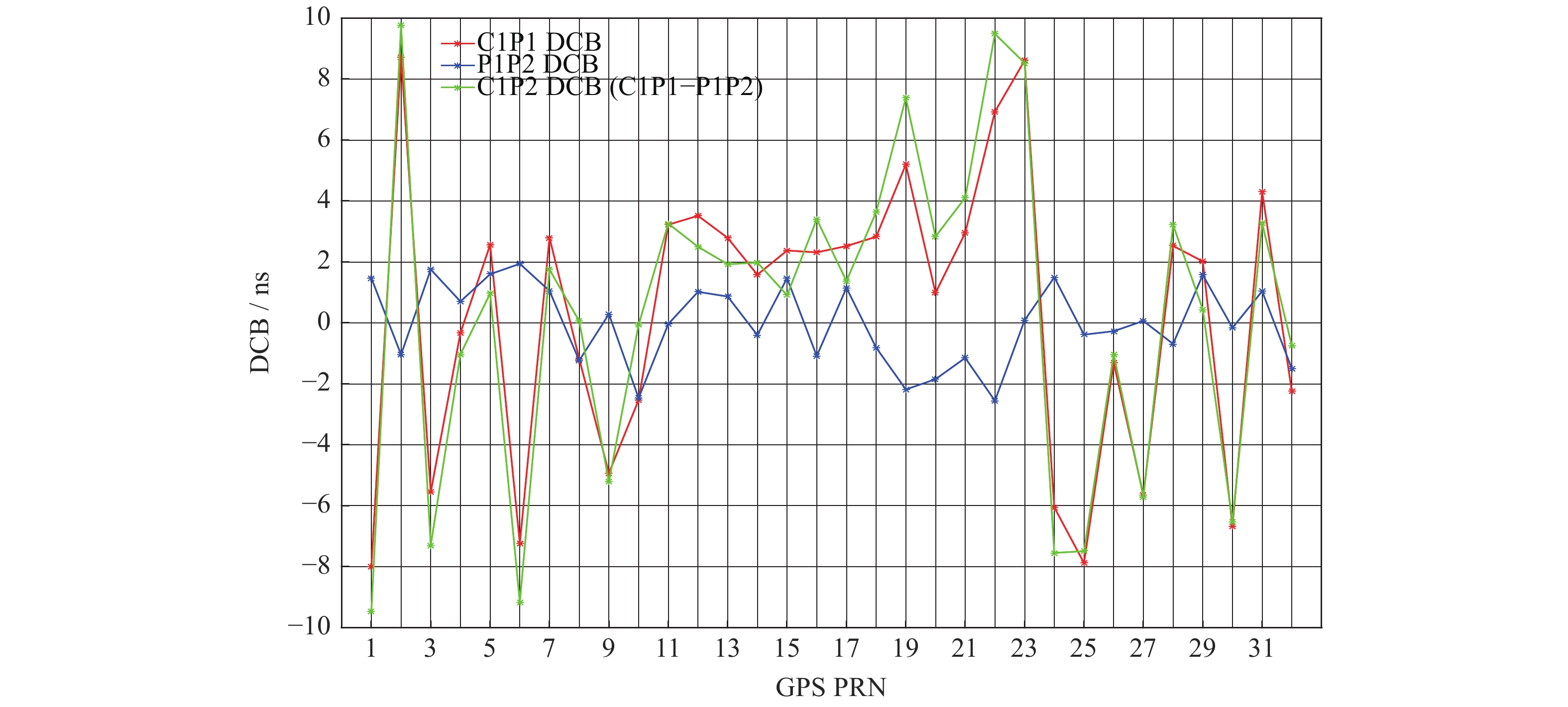
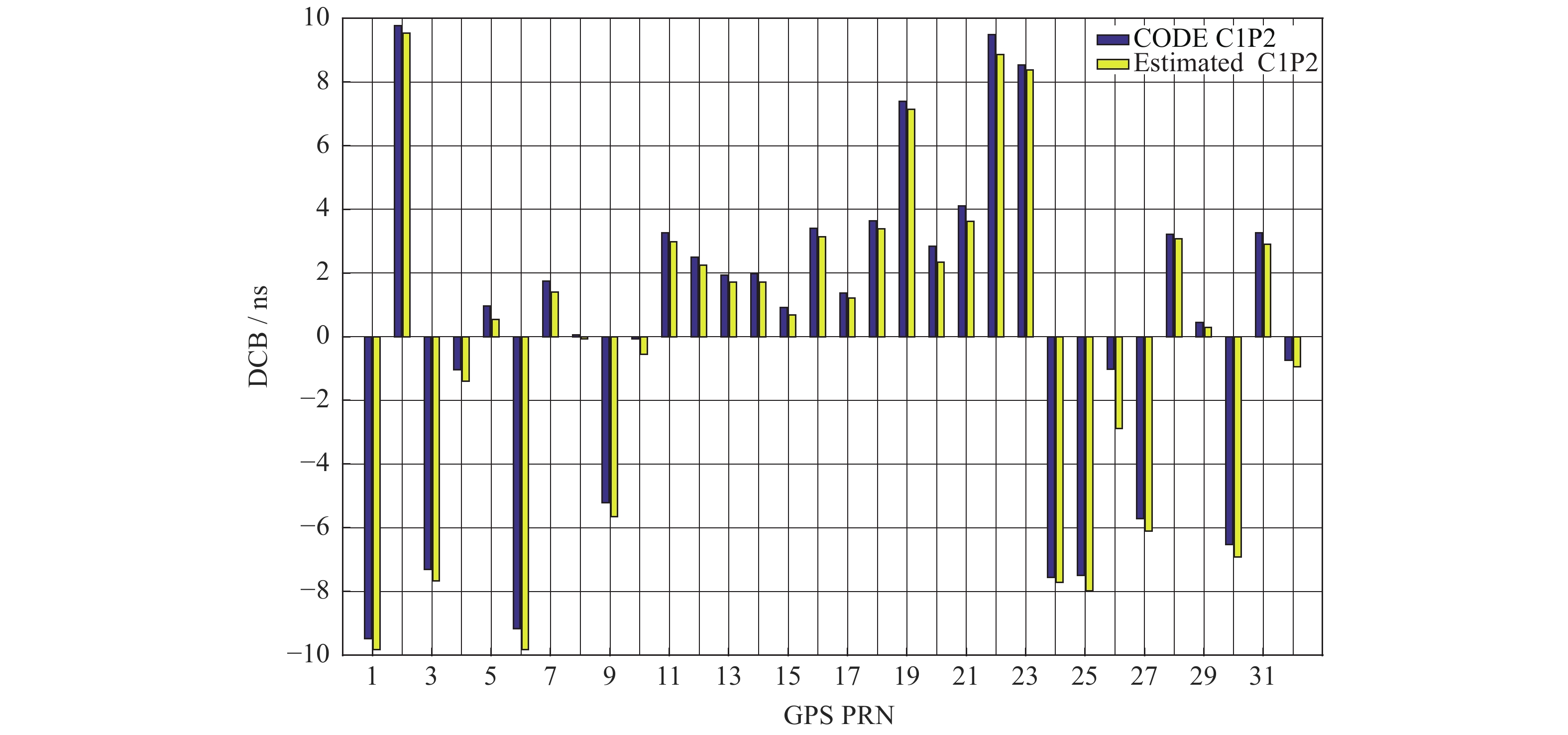
图 6 2015年3月CODE公布与估算的C1P2码偏差对比
Figure 6. Comparison of the deviation between the CODE published in March 2015 and the estimated C1P2 code
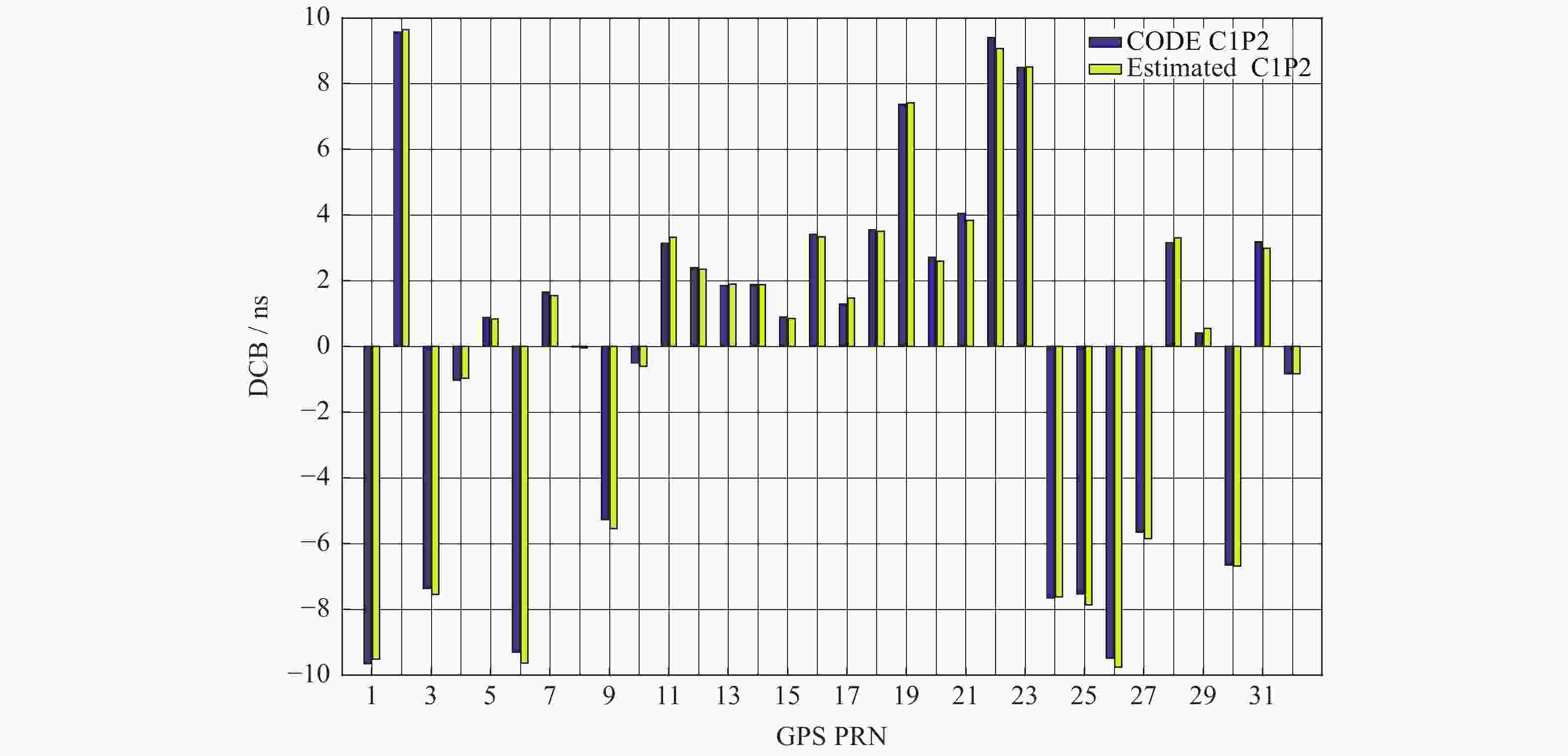
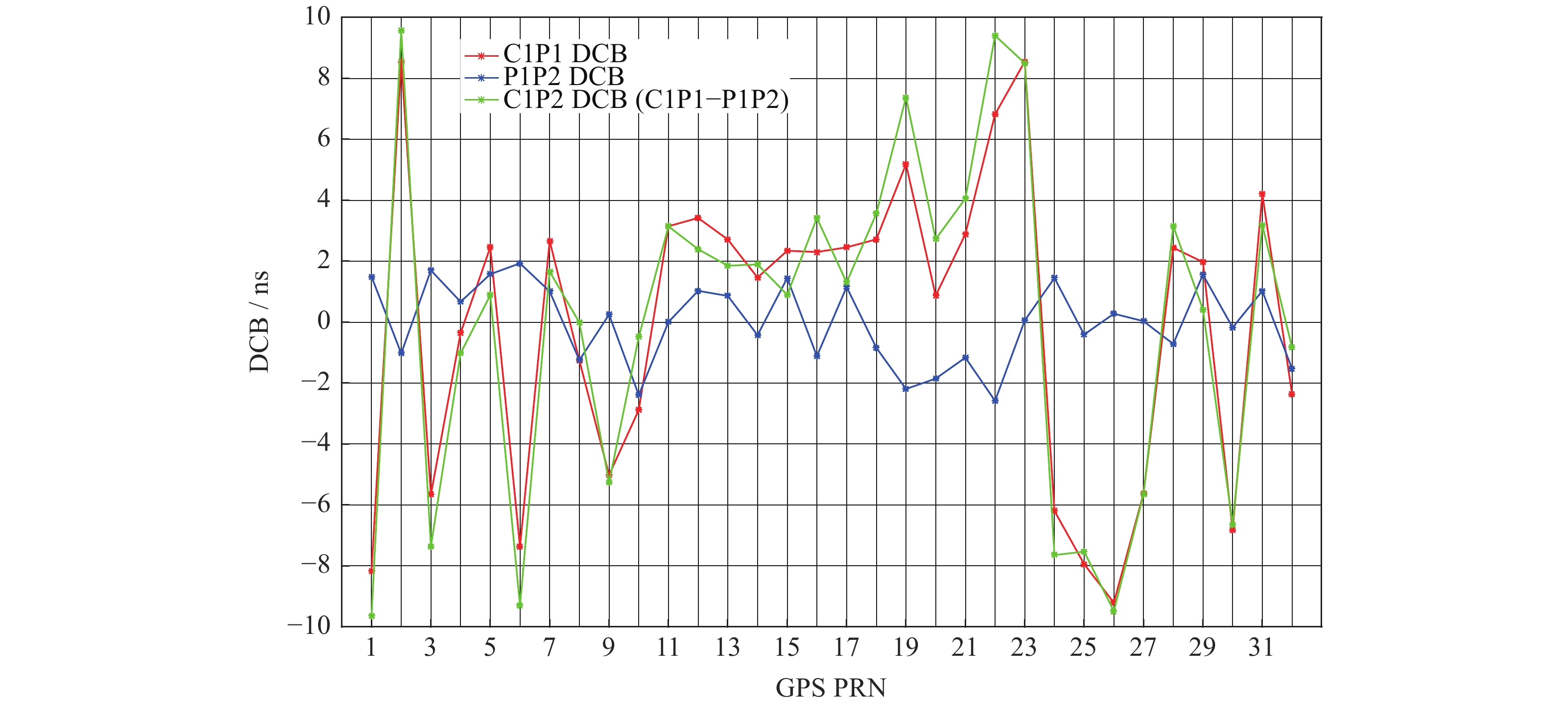
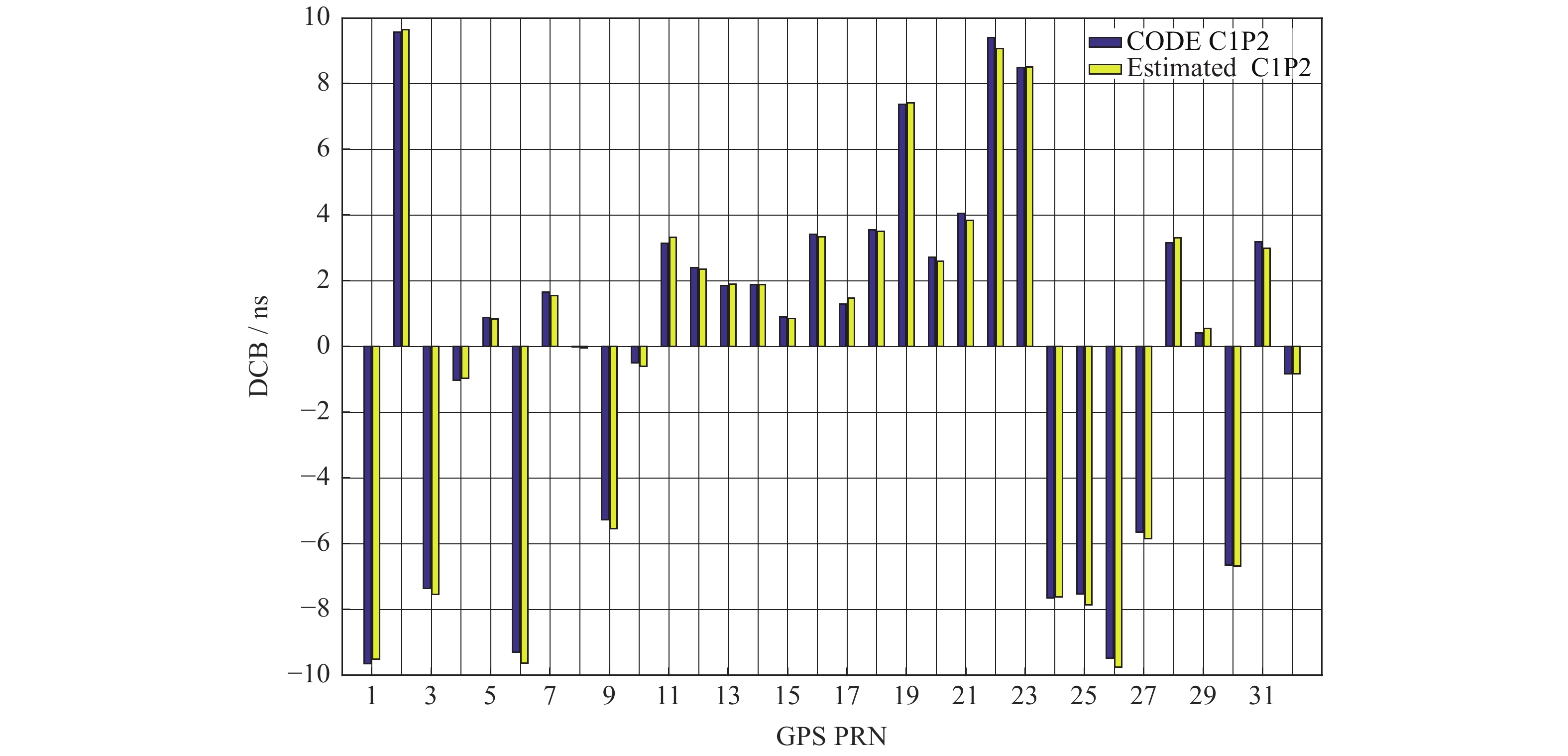
图 7 2015年4月CODE公布与估算的C1P2码偏差对比
Figure 7. Comparison of the deviation between the CODE published in April 2015 and the estimated C1P2 code
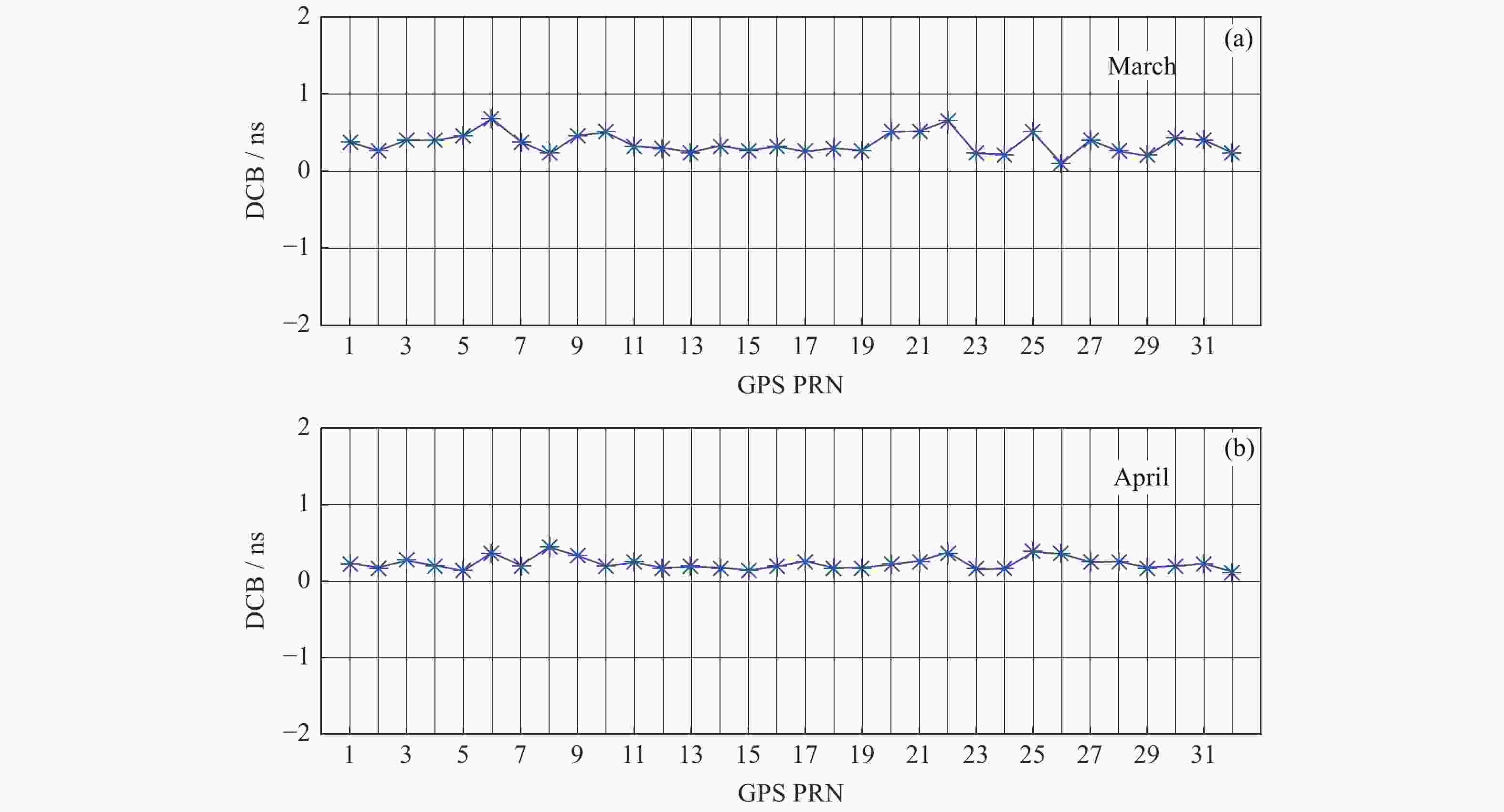
图 8 2015年3月和4月估算的卫星C1P2 DCB RMS误差
Figure 8. Estimated Star C1P2 DCB RMS error in March and April 2015
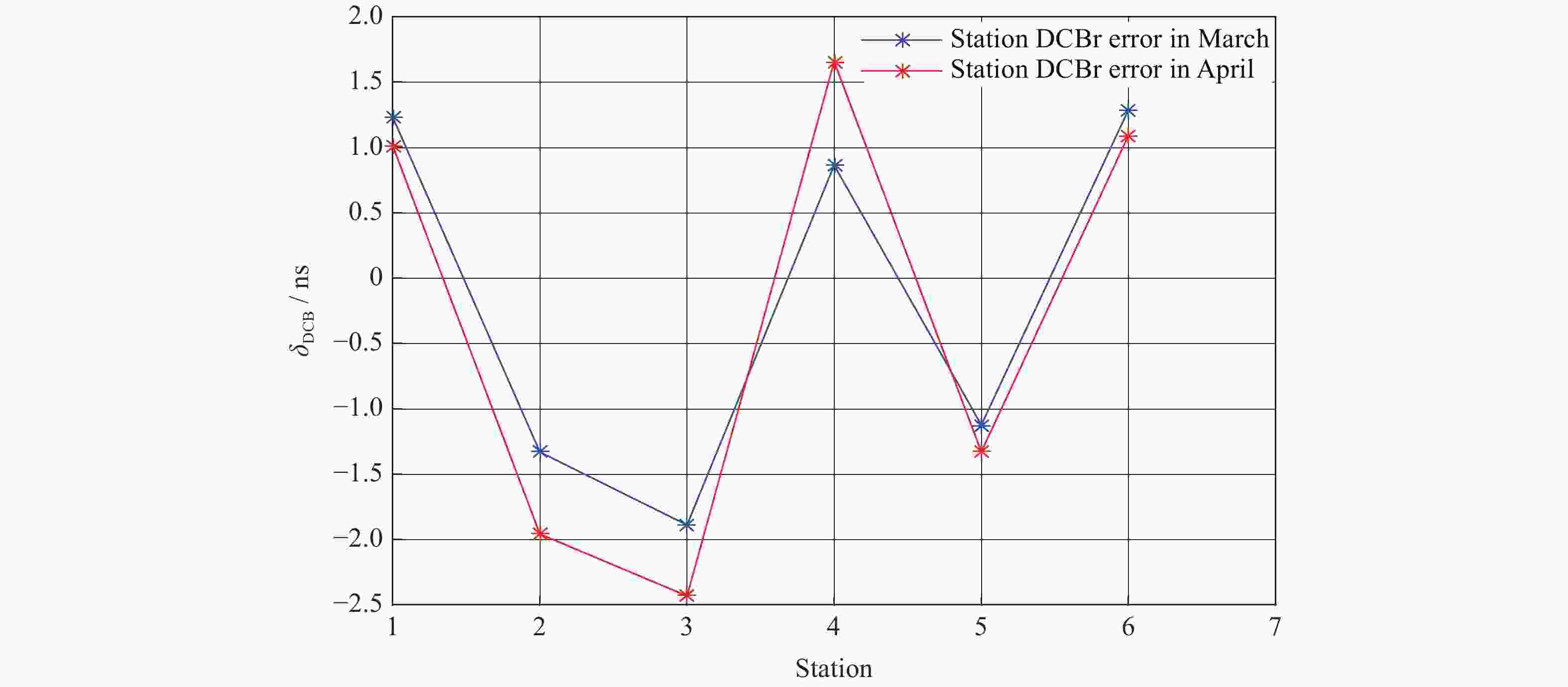
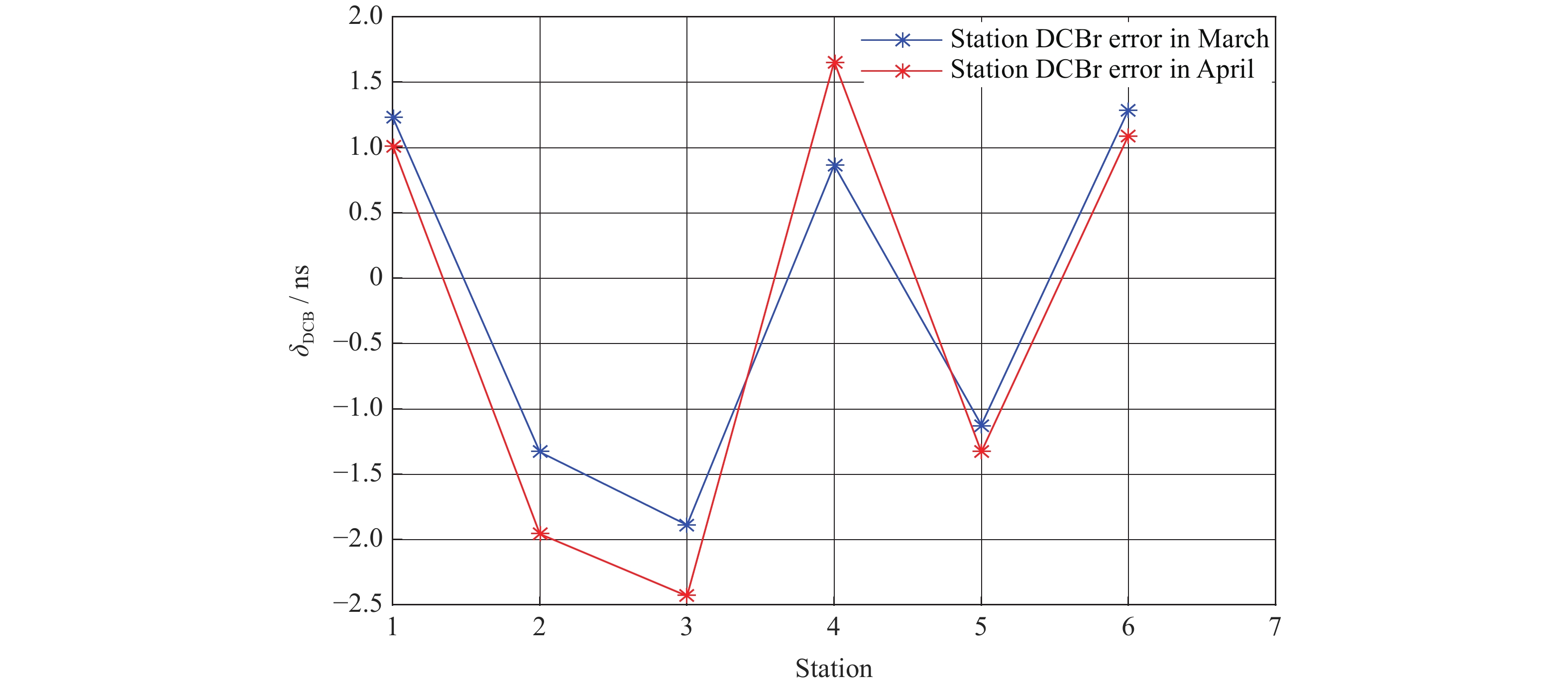
图 9 2015年3和4月估算的测站C1P2 DCBr误差
Figure 9. Estimated Station C1P2 DCBr error in March and April 2015
表 1 估算的2015年3月20个IGS站接收机码偏差值 (单位 ns)
Table 1. Calculated receiver DCB for 20 IGS stations in March 2015 (Unit ns)
IGS站名 abpo albh alg3 baie barh bcov bjco cas1 eliz escu DCBr –4.2823 11.1878 13.2729 9.1391 6.4724 5.8010 –12.6882 –7.6900 2.7586 –14.9059 IGS站名 eur2 ganp geno gldr glps godz guam kiru tid1 wes2 DCBr 11.4201 –8.6954 21.420 4.6395 –0.5536 0.2306 6.1477 7.1547 –21.4409 11.0222  下载: 导出CSV
下载: 导出CSV
表 2 估算的2015年4月20个IGS站接收机码偏差值 (单位 ns)
Table 2. Calculated receiver DCB for 20 IGS stations in April 2015 (Unit ns)
IGS站名 abpo albh alg3 baie barh bcov bjco cas1 eliz escu DCBr –5.0597 11.0122 13.0821 9.0508 6.2674 5.9221 –13.2754 –8.0336 2.7610 –15.0996 IGS站名 eur2 ganp geno gldr glps godz guam kiru tid1 wes2 DCBr 11.4382 –8.9486 21.4702 4.9973 –0.6551 0.1525 7.0748 7.0906 –21.5858 11.1649
下载: 导出CSV
表 3 下载的2015年3和4月6个IGS站接收机码偏差值 (单位 ns)
Table 3. Download receiver DCBr for 6 IGS stations in March and April 2015 (Unit ns)
IGS站名 abpo bjco ganp glps tid1 godz 3月 P1 P2 –5.628 –14.647 –10.175 –1.804 –22.974 –2.234 P1 C1 –0.113 –3.289 –3.368 –0.385 –2.656 –1.175 C1 P2 –5.515 –11.358 –6.807 –1.419 –20.318 –1.059 4月 P1 P2 –5.894 –14.681 –9.989 –1.871 –22.917 –2.042 P1 C1 0.180 –3.363 –3.472 0.442 –2.660 –1.101 C1 P2 –6.074 –11.318 –6.517 –2.313 –20.257 –0.941
下载: 导出CSV
-
[1] LIN J, YUE X A, ZHAO S F. Estimation and analysis of GPS satellite DCB based on LEO observations[J]. GPS Solutions. 2014. DOI 10.1007/s10291-014-0433-1 [2] YUAN L, JIN S, HOQUE M. Estimation of GPS differential code biases based on independent reference station and recursive filter[J]. Remote Sense. 2020, 12, 951. DOI.org/10.3390/rs12060951 [3] 宋小勇, 杨志强, 焦文海, 等. GPS接收机码间偏差(DCB)的确定[J]. 大地测量与地球动力学, 2009, 29(1): 127-131SONG Xiaoyong, YANG Zhiqiang, JIAO Wenhai, et al. Determination of GPS receiver code bias (DCB)[J]. Geodesy and Geodynamics, 2009, 29(1): 127-131 [4] 徐龙威, 刘晖, 舒宝, 等. GLONASS频间码偏差特性分析及其在宽巷模糊度固定中的应用[J]. 测绘学报, 2018, 47(4): 465-472 doi: 10.11947/j.AGCS.2018.20170439XU Longwei, LIU Hui, SHU Bao, et al. Characteristics of GLONASS inter-frequency code bias and its application on wide-lane ambiguity resolution[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(4): 465-472 doi: 10.11947/j.AGCS.2018.20170439 [5] WEI C, ZHANG Q, FAN L, et al. Estimate DCB of BDS satellites based on the observations of GPS/BDS[C]// China Satellite Navigation Conference (CSNC) 2014 Proceedings. Berlin: Lecture Notes in Electrical Engineering, 2014: 351-362 [6] 张辉, 郝金明, 刘伟平, 等. 估计接收机差分码偏差的GPS/BDS非组合精密单点定位模型[J]. 武汉大学学报: 信息科学版, 2019, 44(4): 495-500,592 doi: 10.13203/j.whugis20170119ZHANG Hui, HAO Jinming, LIU Weiping, et al. GPS/BDS precise point positioning model with receiver DCB parameters for raw observations[J]. Geomatics and Information Science of Wuhan University, 2019, 44(4): 495-500,592 doi: 10.13203/j.whugis20170119 [7] 吕志伟, 郝金明, 曾志林, 等. 利用GPS观测资料确定接收机差分码偏差的算法[J]. 全球定位系统, 2010, 35(2): 14-17LÜ Zhiwei, HAO Jinming, ZENG Zhilin, et al. An algorithm for determining receiver differential code error using GPS observation[J]. Global Positioning System, 2010, 35(2): 14-17 [8] 袁云斌. 基于GPS的电离层监测及延迟改正理论与方法的研究[D]. 武汉: 中国科学测量与地球物理研究所, 2002YUAN Yunbin. Research on the theory and method of GPS-based ionospheric monitoring and delay correction[D]. Wuhan: Doctoral Dissertation of Chinese Institute of Scientific Surveying and Geophysics, 2002 [9] 黄健, 汪平, 阮仁贵, 等. 基于GPS的电离层监测及延迟改正理论与方法的研究[J]. 大地测量与地球动力学, 2010, 30(3): 110-117HUANG Jian, WANG Ping, RUAN Rengui, et al. Research on the Theory and Method of GPS-based Ionospheric Monitoring and Delay Correction[J]. Geodesy and Geodynamics, 2010, 30(3): 110-117 [10] 张小红, 唐龙. COSMIC低轨卫星GPS接收机差分码偏差估计[J]. 地球物理学报, 2014, 57(2): 377-383 doi: 10.6038/cjg20140204ZHANG Xiaohong, TANG Long. COSMIC low-orbit satellite GPS receiver differential code bias estimation[J]. Chinese Journal of Geophysics, 2014, 57(2): 377-383 doi: 10.6038/cjg20140204 [11] SCHARE S, GURTNER W, FELRENS J. 1998. IONEX: The ionosphere map exchange format version 1[OL]. [2015-09-17]. https://gssc.esa.int/wp-content/uploads/2018/07/ionex11.pdf [12] ZHOU P Y, NIE Z X, YAN X, et al. Differential code bias estimation based on uncombined PPP with LEO onboard GPS observations[J]. Advances in Space Research, 2020, 65(1): 541-551 doi: 10.1016/j.asr.2019.10.005 [13] ZHU Y, JIA X, LIANG Y. Analysis of positioning accuracy for COMPASS based on single/multi frequency pseudo-range[C]// China Satellite Navigation Conference (CSNC) 2013 Proceedings. Berlin: Lecture Notes in Electrical Engineering, 2013: 391-401 [14] 姚宜斌, 刘磊, 孔建, 等. GIM和不同约束条件相结合的BDS差分码偏差估计[J]. 测绘学报, 2017, 46(2): 135-143 doi: 10.11947/j.AGCS.2017.20160375YAO Yibin, LIU Lei, KONG Jian, et al. Estimation of BDS DCB combining GIM and different zero-mean constraints[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(2): 135-143 doi: 10.11947/j.AGCS.2017.20160375 [15] 袁运斌, 张宝成, 李敏. 多频多模接收机差分码偏差的精密估计与特性分析[J]. 武汉大学学报: 信息科学版, 2018, 43(12): 2106-2111 doi: 10.13203/j.whugis20180135YUAN Yunbin, ZHANG Baocheng, LI Min. Precise estimation and characteristic analysis of Multi-GNSS receiver differential code biases[J]. Geomatics and Information Science of Wuhan University, 2018, 43(12): 2106-2111 doi: 10.13203/j.whugis20180135 [16] 李征航, 黄劲松. GPS测量与数据处理[M]. 武汉: 武汉大学出版社. 2010: 92-105LI Zhenghang, HUANG Jinsong. GPS measurement and data processing[M]. Wuhan: Wuhan University Press, 2010: 92-105 [17] 谢钢. GPS原理与接收机设计[M]. 北京: 电子工业出版社, 2009.7: 80-84XIE Gang. GPS Principle and Receiver Design[M]. Beijing: Publishing House of Electronics Industry, 2009: 80-84 [18] CHOI B, MIN R. Comparison of GPS receiver DCB estimation methods using a GPS network[J]. Earth Planet Space, 2013. DOI.org/10.5047/eps.2012.10.003 [19] LINKFILED T G, TIEDJE J M. Characterization of the requirements and substrates for reductive dehalogenation by strain DCB-1[J]. Journal of Industrial Microbiology, 1990(5): 9-15 doi: 10.1007/BF01569601 [20] 唐卫明, 刘前, 高柯夫, 等. 北斗伪距码偏差对基线解算的影响分析[J]. 武汉大学学报: 信息科学版, 2018, 43(8): 1199-1206 doi: 10.13203/j.whugis20170110TANG Weiming, LIU Qian, GAO Kefu, et al, SHEN Mingxing. Influence of BDS pseudorange code biases on baseline resolution[J]. Geomatics and Information Science of Wuhan University, 2018, 43(8): 1199-1206 doi: 10.13203/j.whugis20170110 [21] Tabatabaei A, Mosavi M R, Khavari A, et al. Reliable urban canyon navigation solution in GPS and GLONASS integrated receiver using improved fuzzy weighted least-square method[J]. Wireless Personal Communications, 2017: 3181-3196 doi: 10.1007/s11277-016-3771-1 [22] Gu S, Dang Y, Wang H, et al. The effect of DCB correction on multi-system combination precise point positioning[C]// China Satellite Navigation Conference (CSNC) 2019 Proceedings. Berlin: Lecture Notes in Electrical Engineering, Singapore2019: 305-313 [23] 张强, 赵齐乐, 章红平, 等. 利用北斗观测实验网解算北斗卫星差分码偏差[J]. 武汉大学学报 : 信息科学版, 2016, 41(12): 1649-1655 doi: 10.13203/j.whugis20140640ZHANG Qiang, ZHAO Qile, ZHANG Hongping, et al. BDS differential code bias estimation using Beidou experimental tracking stations[J]. Geomatics and Information Science of Wuhan University, 2016, 41(12): 1649-1655 doi: 10.13203/j.whugis20140640 [24] ZHONG J H, LEI J H, YUE X, et al. Determination of differential code bias of GNSS receiver onboard low Earth orbit ssatellite[J]. Remote Sensing. 2016: 4896-4905. DOI: 10.1109/TGRS.2016.2552542 [25] JIAO W H, GENG C J, MA Y H , et al. A method to estimate DCB of COMPASS satellites based on global ionosphere map[C]// China Satellite Navigation Conference (CSNC) 2012 Proceedings. Berlin: Lecture Notes in Electrical Engineering , 2012: 347-353 [26] 楼益栋, 龚晓鹏, 辜声峰, 等. 北斗卫星伪距码偏差特性及其影响分析[J]. 武汉大学学报: 信息科学版, 2017, 42(8): 1040-1046 doi: 10.13203/j.whugis20150107LOU Y D, GONG X P, GU Shengfeng, et al. The characteristic and effect of code bias variations of Beidou[J]. Geomatics and Information Science of Wuhan University, 2017, 42(8): 1040-1046 doi: 10.13203/j.whugis20150107 [27] 梅登奎, 闻德保. MGEX北斗差分码偏差两种精确处理方法对比分析[J]. 空间科学学报, 2019, 39(5): 662-669 doi: 10.11728/cjss2019.05.662MEI Dengkui, WEN Debao. Comparative Analysis of Two Precise Processing Methods for MGEX BDS Differential Code Biases[J]. Chinese Journal of Space Science, 2019, 39(5): 662-669 doi: 10.11728/cjss2019.05.662 [28] JIN R, JIN S, FENG G P, et al. Matlab code for estimating GNSS satellite and receiver differential code biases[J]. GPS Solution, 2012. DOI.org/10.1007/s10291-012-0279-3 [29] 王宁波. GNSS差分码偏差处理方法及全球广播电离层模型研究[J]. 测绘学报, 2017, 46(8): 1069-1069 doi: 10.11947/j.AGCS.2017.20160387WANG Ningbo. Study on GNSS differential code biases and global broadcast ionospheric models of GPS, Galileo and BDS[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(8): 1069-1069 doi: 10.11947/j.AGCS.2017.20160387 -
-

 下载:
下载:

计量
- 文章访问数: 869
- HTML全文浏览量: 282
- PDF下载量: 37
-
被引次数:
0(来源:Crossref)
0(来源:其他)

