


Drone-airborne Interference Array Platform for Outfield Tests
-
摘要: 超长波波段的电波波长为十米到几百米,如果要在超长波波段对宇宙射电信号实现高分辨率成像,天线口径通常需要达到波长数百倍乃至数千倍以上,传统的单天线方法不再适用。月球背面是在日地空间中开展超长波观测的最佳地点。空间分布式被动微波干涉成像技术的主要思想是利用分布式卫星星座,在深空实现超大的干涉测量基线替代大口径天线,实现对宇宙射电源的高分辨率成像。为促进方案优化,需在卫星在轨部署前开展充分的地面试验,对空间分布式干涉测量系统的关键技术进行验证。为消除地面试验中通信测距系统的多径效应,并实现支持多无人机编队与控制,达到cm级定位精度等要求,本文搭建了无人机机载干涉阵列外场试验平台,通过无人机搭载有效载荷,模拟多星绕月自主编队飞行,形成不同尺度的干涉基线。该平台可应用于超长波天文观测阵列(DSL),开展测距与测角等原理性验证,也可推广用于其他分布式无人机机载试验。Abstract: As the wavelength of ultra-long band radio waves is from several meters to several hundred meters, to achieve high-resolution imaging of cosmic radio signals in the ultra-long wave band, the antenna diameter is usually required to reach hundreds or even thousands times of the wavelength. The traditional single antenna method is no longer applicable. The far side of the Moon is shielded from radio interference from Earth and has the quietest electromagnetic environment in the solar and terrestrial space, making it ideal for ultra-long-wave observations. The main idea of space-distributed passive microwave interference imaging technology is to use distributed satellite constellations to achieve oversized interferometric baselines in deep space to realize the high-resolution imaging of cosmic radio sources, instead of using large aperture antenna. In order to promote the scheme optimization, it is necessary to conduct sufficient ground tests before the satellites are deployed in-orbit to verify the key technologies of the space distributed interferometry system. The drone-airborne interference array platform is built for effectively solving the multipath effects of the communication ranging system in ground tests, supporting multi-drone formation and control, and the positioning accuracy is up to the centimeter level. By carrying payloads on drones and simulating satellites’ autonomous formation flying around the Moon, interference baselines in different scales are formed. The platform can be used in the mission of Discovering the Sky at the Longest wavelength with small satellites (DSL) to conduct principle verifications such as ranging and angle measurement. It can also be popularized for other distributed drone airborne tests, which is economically feasible and has good application prospects.
-
Key words:
- Ultra-long band /
- Drone group /
- Formation /
- Interference array /
- Test platform
-
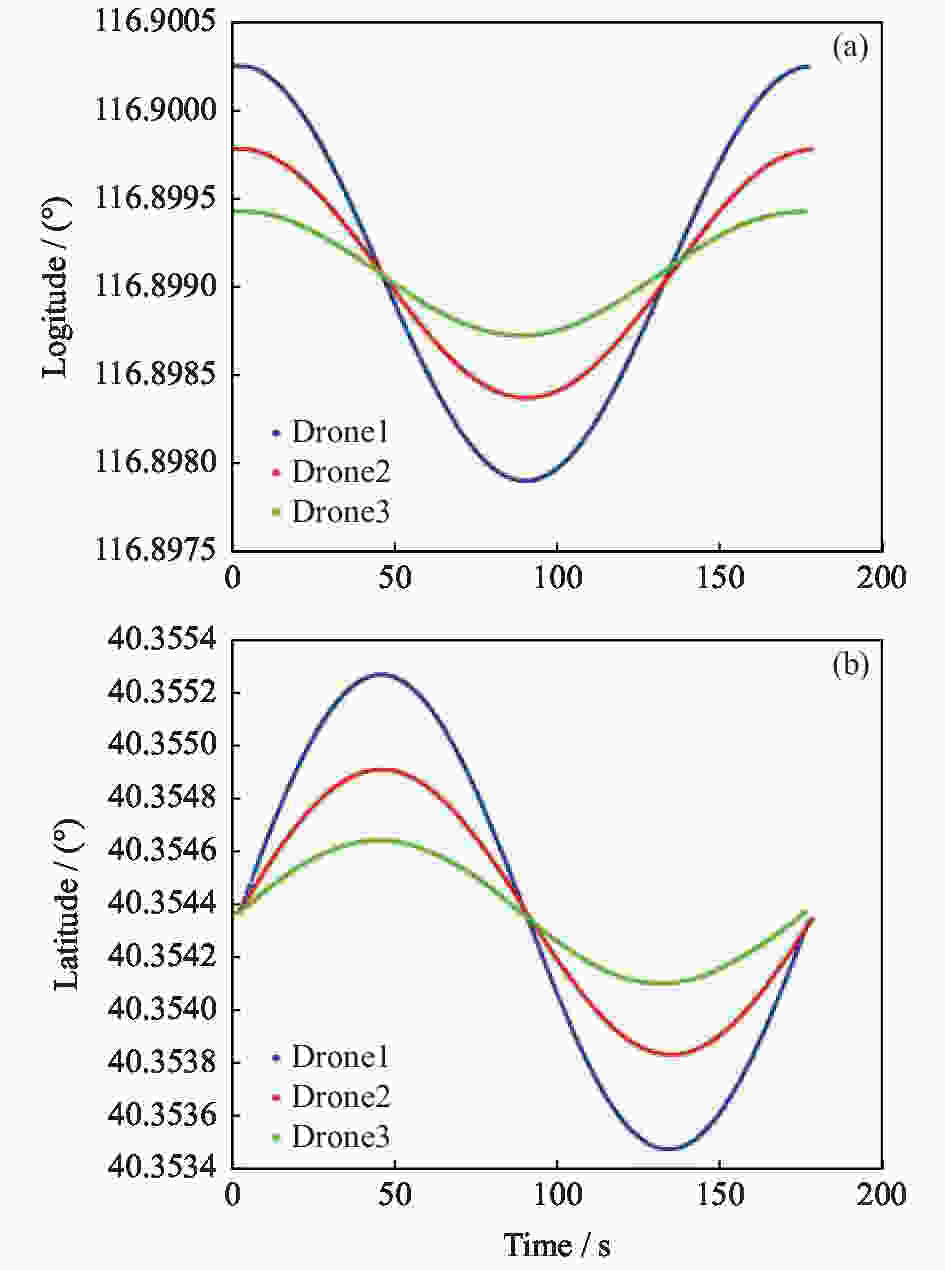
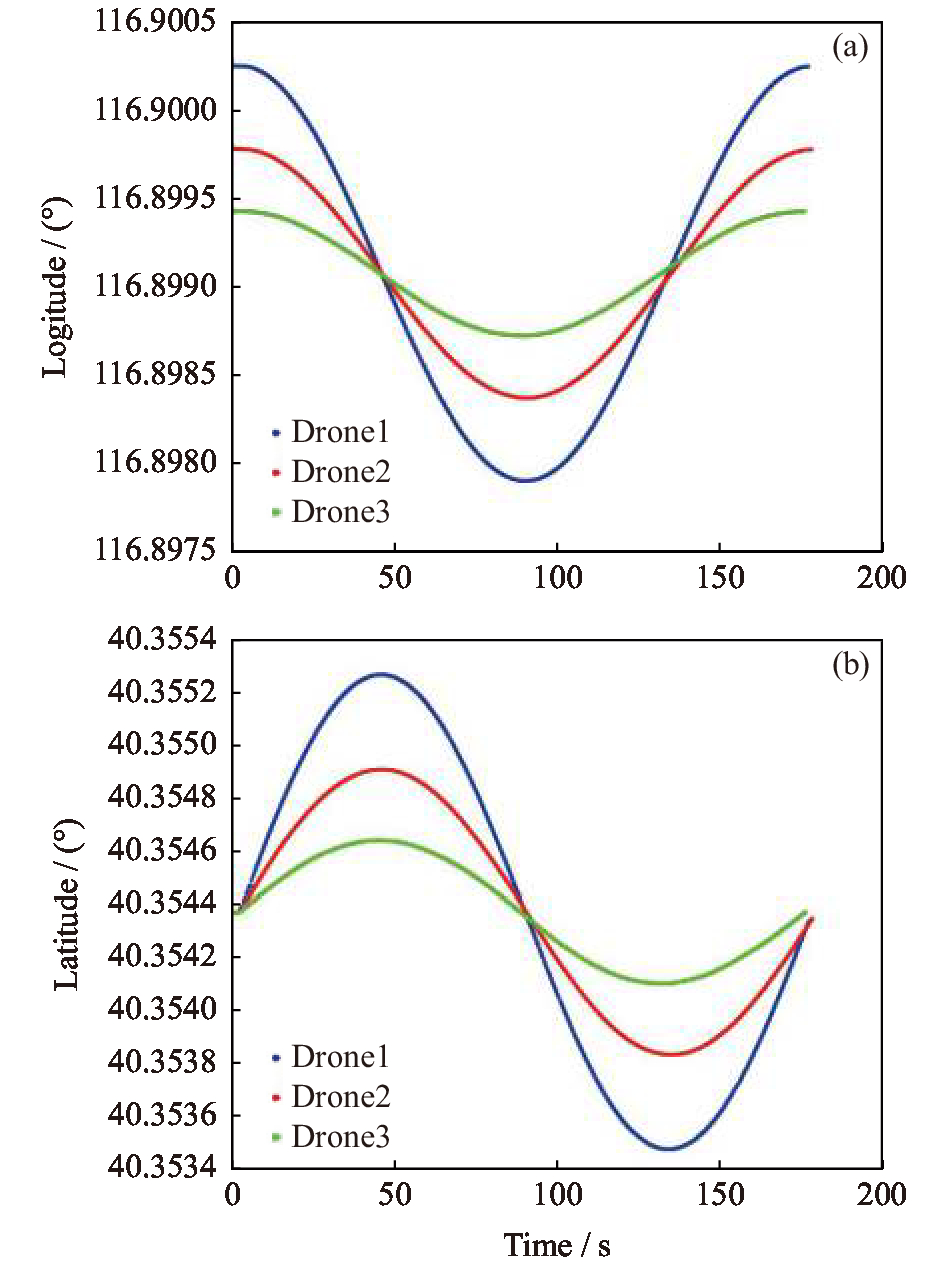
图 7 Drone 1~3无人机的经度(a)和纬度(b)
Figure 7. Diagram for the longitude (a) and latitude (b) of Drone 1~3
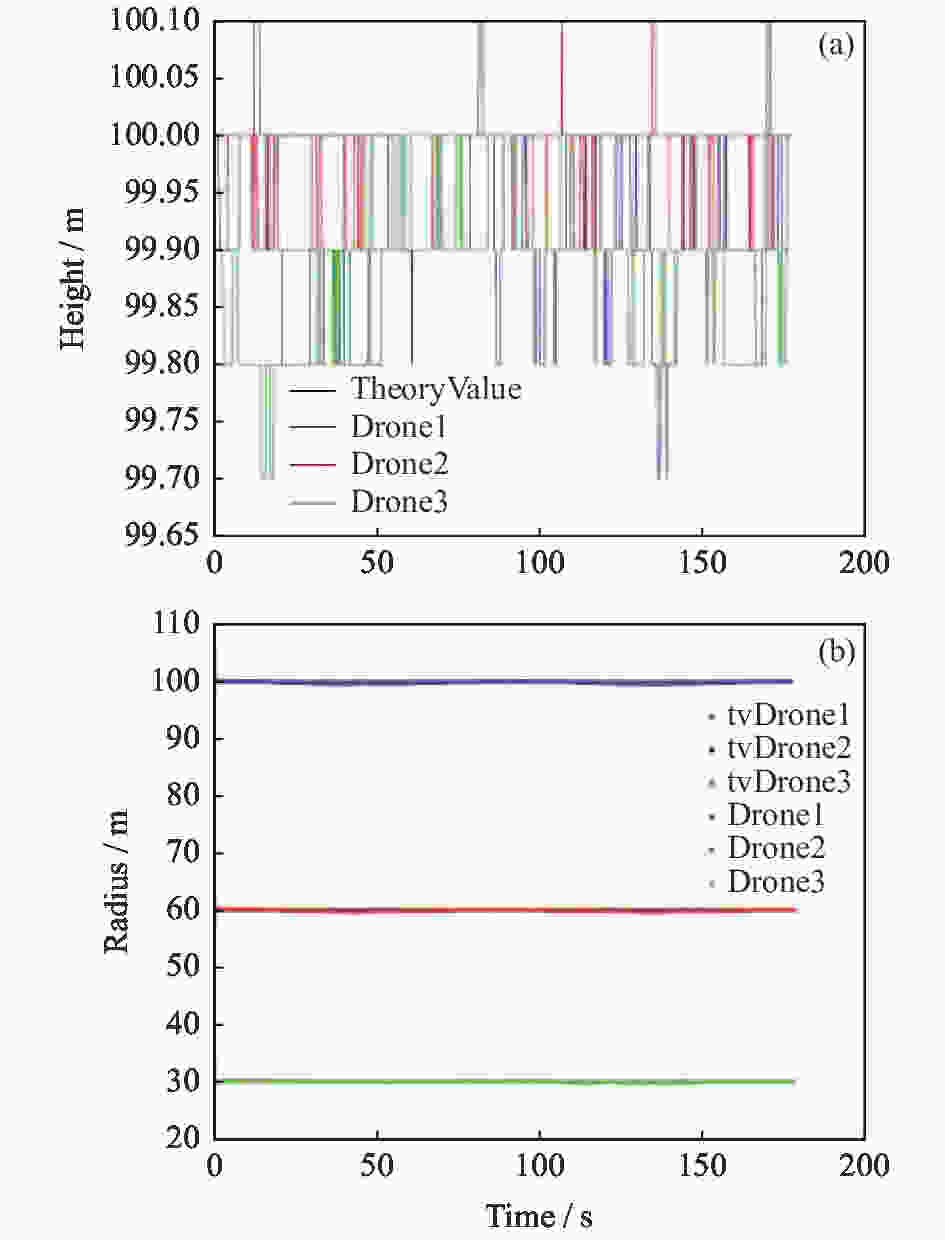
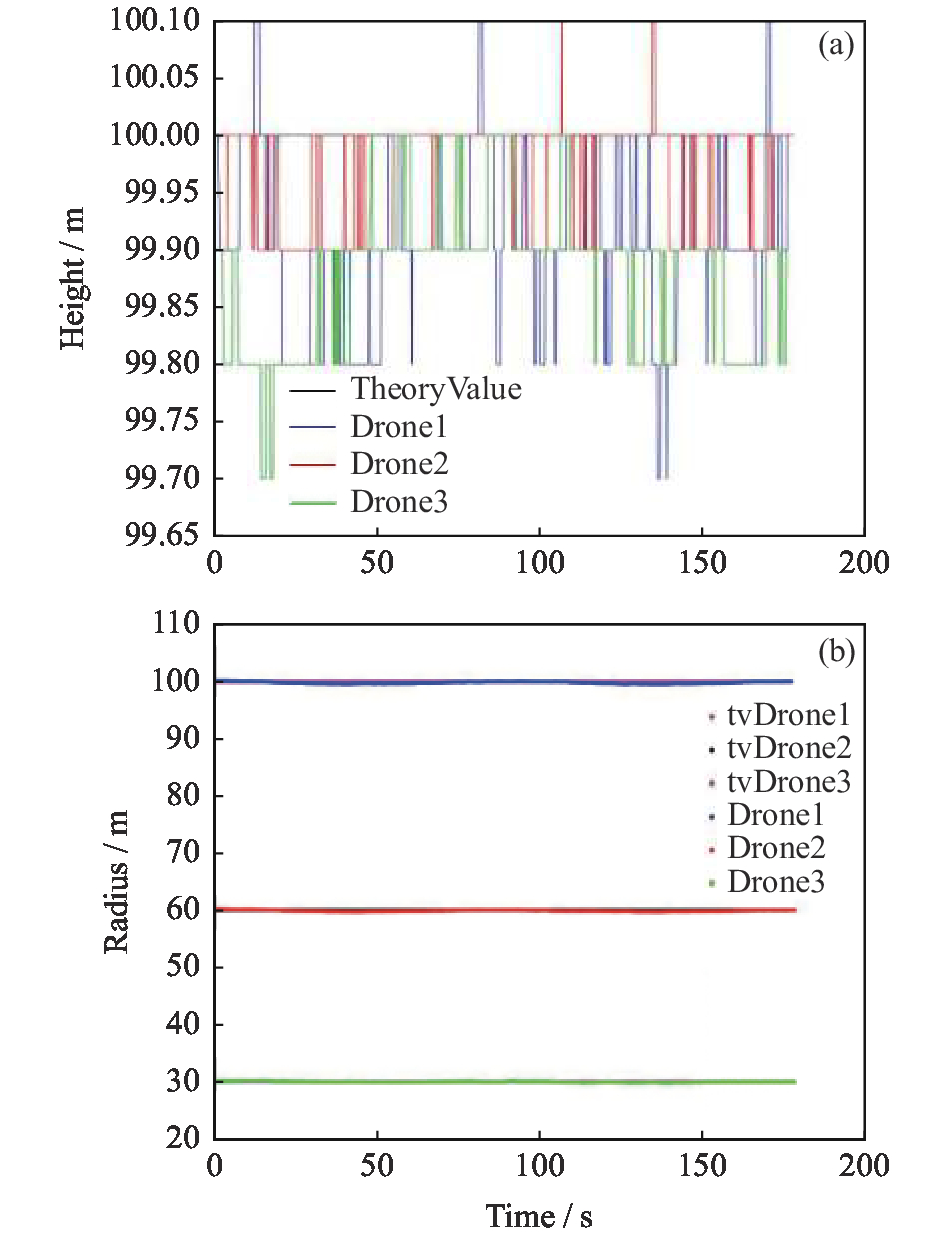
图 8 Drone 1~3无人机绕飞的高度(a)及半径(b)
Figure 8. Diagram for the height (a) and radius (b) of Drone 1~3
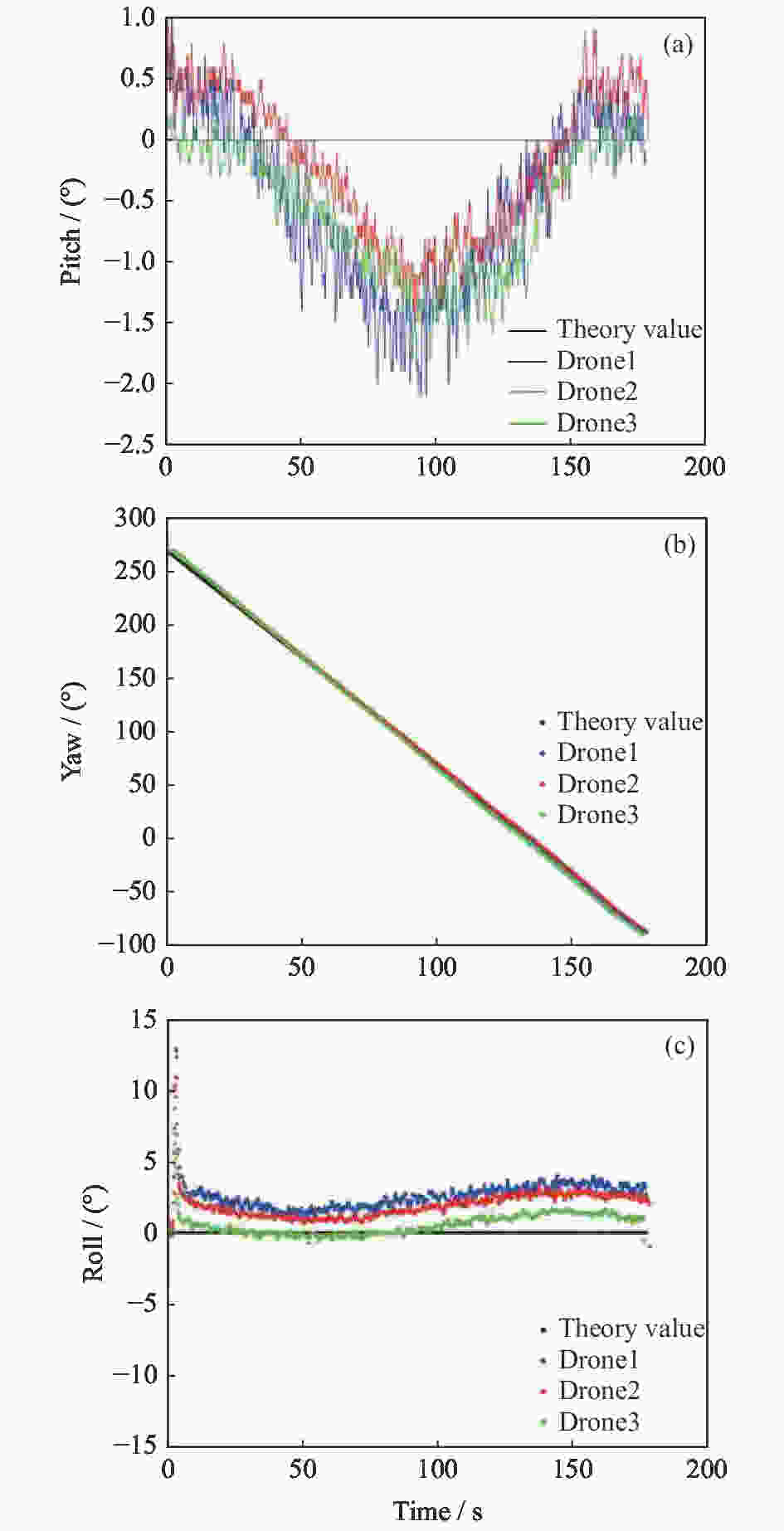
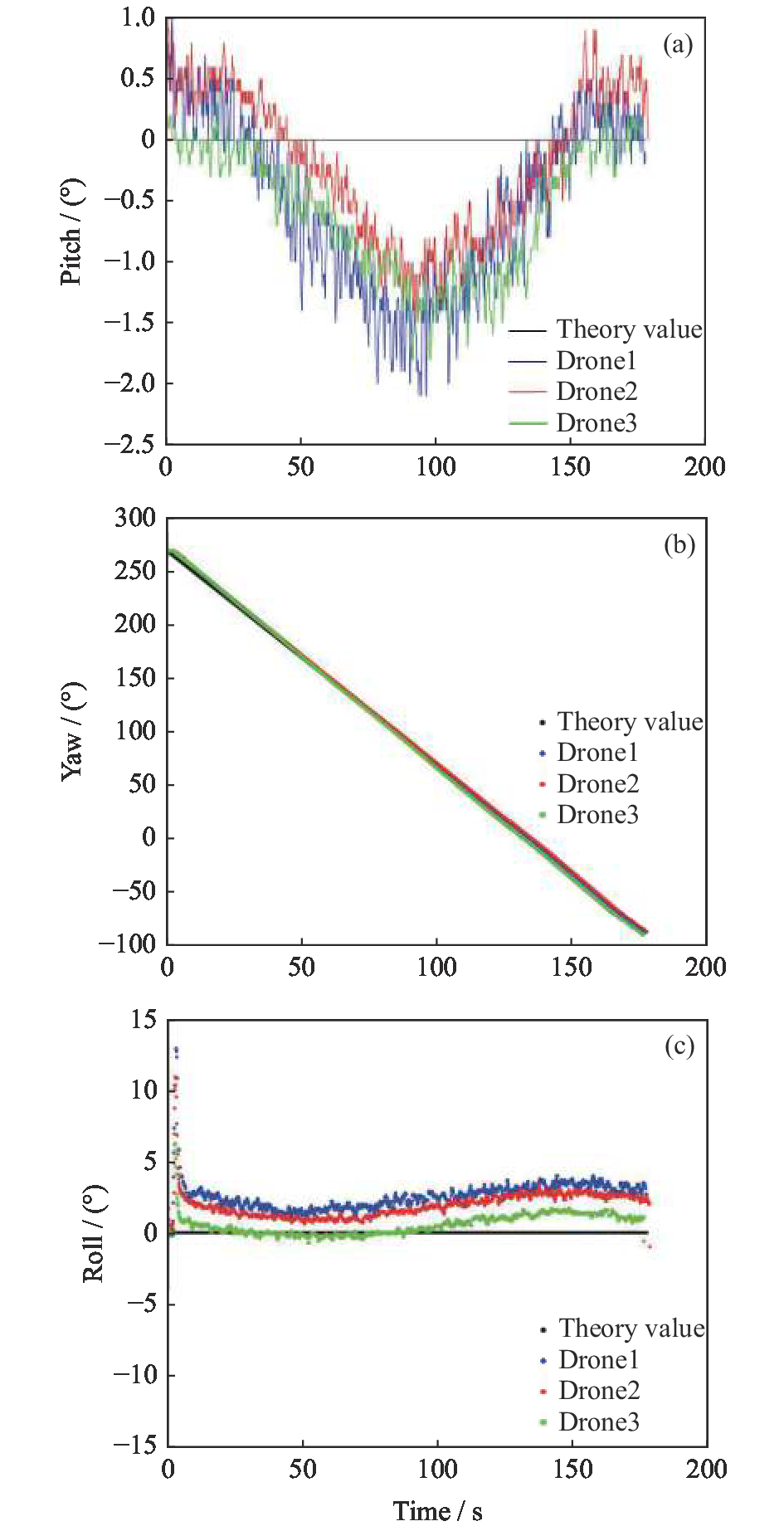
图 10 Drone 1~3无人机绕飞的俯仰、偏航和横滚角度
Figure 10. Diagram for pitch, yaw, and roll angles of Drone 1~3
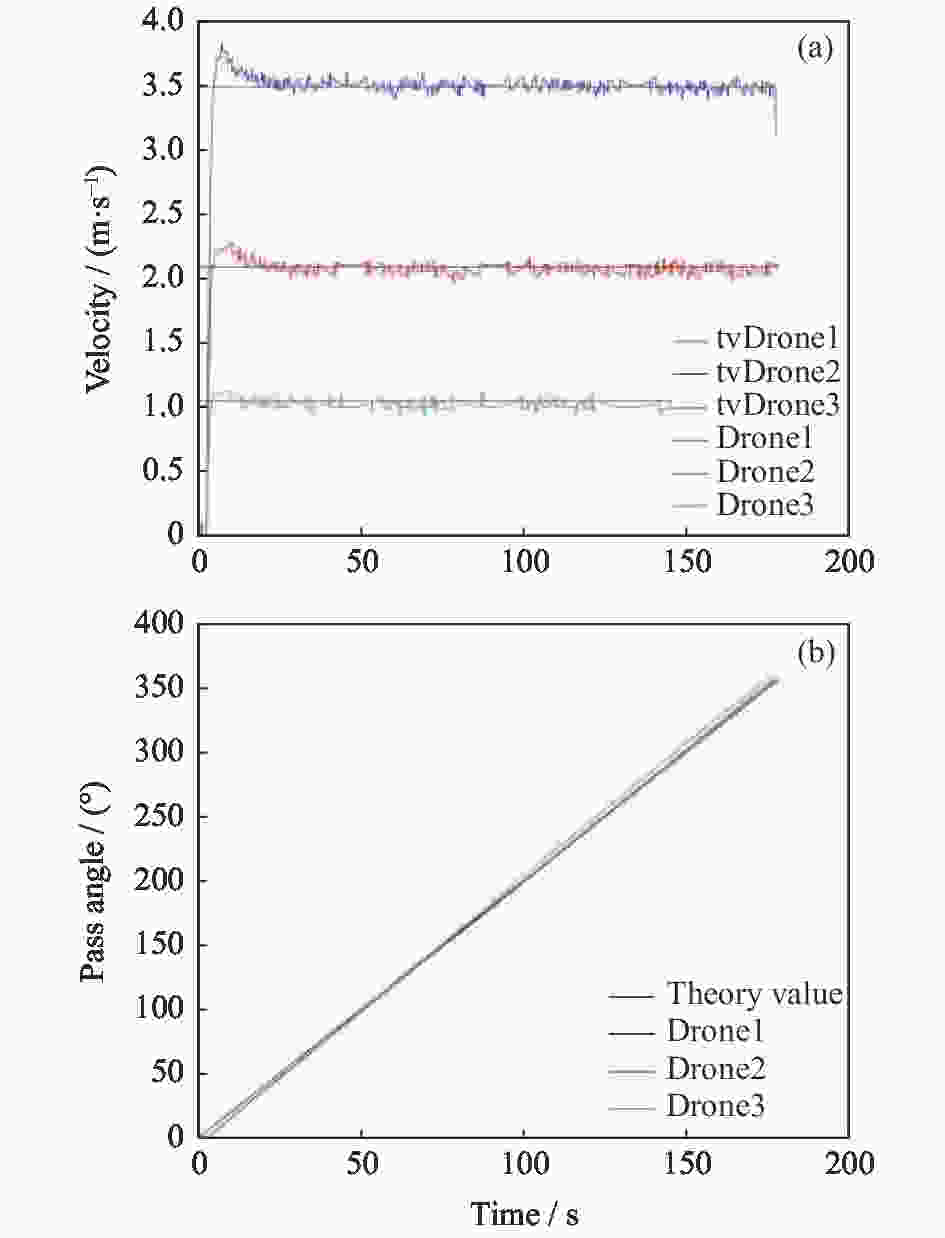
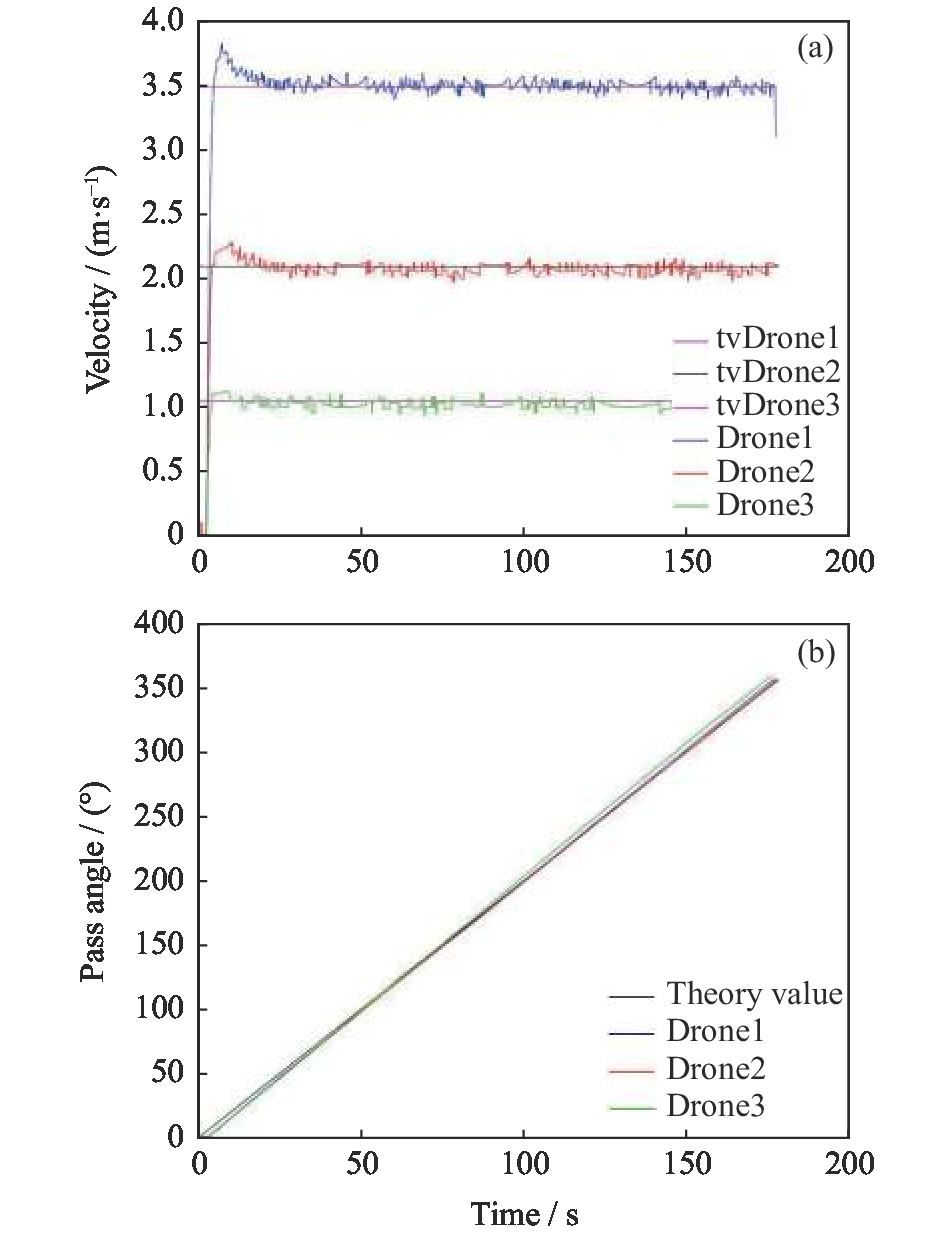
图 9 Drone 1~3无人机绕飞的速度(a)及已绕飞角度(b)
Figure 9. Diagram for the velocity (a) and passed angle (b) of Drone 1~3
表 1 试验平台性能指标
Table 1. Performance indicators for test platform
指标 星载 机载 卫星高度 / km 300 0.5 运动速度 / (km·s–1) 1 最大0.018 相对运动速度/ (km·s–1) 0 - 基线范围 / km 1~100 - 基线测量精度 1 m M600 Pro(D-RTK GNSS)定位精度cm级,输出步长0.2 s,5 Hz,支持最远距离500 m
垂直:2±1×10–6 cm
水平:1±1×10–6 cm
测速精度:0.03 m·s–1
无D-RTK GNSS悬停精度:垂直±0.5 m,水平±1.5 m姿态指向精度/ (°) 0.2(子星) 角度抖动量±0.03 续航能力 - 16 min(起飞重量15.5 kg)  下载: 导出CSV
下载: 导出CSV
表 2 Drone 1~3无人机的误差统计
Table 2. Statistics of parameter errors of Drone 1~3
参数 Drone 1 Drone 2 Drone 3 系统误差$\mu $
(均值)随机误差$\sigma $
(标准差)系统误差$\mu $
(均值)随机误差$\sigma $
(标准差)系统误差$\mu $
(均值)随机误差$\sigma $
(标准差)高度偏差/m –0.092140 0.077076 –0.032933 0.048532 –0.122202 0.064416 半径偏差/m –0.180739 0.169186 –0.101400 0.119801 –0.038595 0.069895 角度偏差/(°) –0.648435 2.295938 –1.311378 1.475737 1.948060 3.997667 横滚角偏差/(°) 2.512534 1.061955 1.914133 0.918078 0.501766 0.717302 俯仰角偏差/(°) –0.523238 0.687378 –0.189400 0.594845 –0.590412 0.518368 偏航角偏差/(°) 0.610211 2.274088 1.549145 1.837493 –1.953078 3.971161
下载: 导出CSV
-
[1] ZHANG Xiaodong. Analysis of unmanned airborne multi-station time difference location system[J]. Shipboard Electronic Countermeasure, 2018, 41(4): 11-14 [2] ZHOU Huan, TONG Fengxian, LI Haitao, et al. Relative position determination between deep-space probes based on same beam phase-referencing imaging technique[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(6): 634-640 doi: 10.11947/j.AGCS.2015.20140240 [3] LIU Y A, WANG Q, DONG C Y, et al. Time-varying formation control for unmanned aerial vehicles with external disturbances[J]. Transactions of the Institute of Measurement and Control, 2019, 41(13): 3777-3786 doi: 10.1177/0142331219836588 [4] DU H B, ZHU W W, WEN G H, et al. Distributed formation control of multiple quadrotor aircraft based on nonsmooth consensus algorithms[J]. IEEE Transactions on Cybernetics, 2019, 49(1): 342-353 doi: 10.1109/TCYB.2017.2777463 [5] BURNS J O, LAZIO J, BALE S, et al. Probing the first stars and black holes in the early universe with the Dark Ages Radio Explorer (DARE)[J]. Advances in Space Research, 2012, 49(3): 433-450 doi: 10.1016/j.asr.2011.10.014 [6] MAHMOOD A, KIM Y. Leader-following formation control of quadcopters with heading synchronization[J]. Aerospace Science and Technology, 2015, 47: 68-74 doi: 10.1016/j.ast.2015.09.009 [7] NO T S, KIM Y, TAHK M J, et al. Cascade-type guidance law design for multiple-UAV formation keeping[J]. Aerospace Science and Technology, 2011, 15(6): 431-439 doi: 10.1016/j.ast.2010.08.011 [8] YI WEN, LEI BIN. Consensus-based control method for geometrical configuration of UAVs formation flight[J]. Journal of Wuhan University of Science and Technology (Natural Science Edition) , 2019, 42(2): 150-154 [9] ALVARENGA J, VITZILAIOS N I, VALAVANIS K P, et al. Survey of unmanned helicopter model-based navigation and control techniques[J]. Journal of Intelligent & Robotic Systems, 2015, 80(1): 87-138 [10] LI Haitao, ZHOU Huan, ZHANG Xiaolin. Research on phase referencing VLBI technique in deep space navigation[J]. Journal of Astronautics, 2018, 39(2): 147 [11] ZHANG Jinxiu, CHEN Xuelei, CAO Xibin, et al. Formation flying around lunar for ultra-long wave radio interferometer mission[J]. Journal of Deep Space Exploration, 2017, 4(2): 158-165 [12] LI Y B, SONG S X. A survey of control algorithms for Quadrotor Unmanned Helicopter[C]//Proceedings of the 2012 IEEE 5 th international Conference on Advanced Computational Intelligence. Nanjing: IEEE, 2012 [13] FLEUREAU J, GALVANE Q, TARIOLLE F L, et al. POSTER: generic drone control platform for autonomous capture of cinema scenes submission[C]//Proceedings of the 14 th Annual International Conference on Mobile Systems, Applications, and Services Companion. Singapore: ACM, 2016 [14] NIE Bowen, MA Hongxu, WANG Jian, et al. Research status and key technologies of micro-small quadcopter[J]. Electronics Optics & Control, 2007, 14(6): 113-117 doi: 10.3969/j.issn.1671-637X.2007.06.028 [15] MA Mingyu, DONG Chaoyang, MA Siqian, et al. Coordinated control of multiple quadrotors formation on SO(3)[J]. Control Theory & Applications, 2018, 35(9): 1229-1238 doi: 10.7641/CTA.2018.70651 [16] WENG S X, YUE D, YANG T C. Coordinated attitude motion control of multiple rigid bodies on manifold SO(3)[J]. IET Control Theory & Applications, 2013, 7(16): 1984-1991 [17] BACHRACH A, HE R J, ROY N. Autonomous flight in unknown indoor environments[J]. International Journal of Micro Air Vehicles, 2009, 1(4): 217-228 doi: 10.1260/175682909790291492 -
-

 下载:
下载:

计量
- 文章访问数: 1320
- HTML全文浏览量: 553
- PDF下载量: 45
-
被引次数:
0(来源:Crossref)
0(来源:其他)

