


空中拖曳锥杆式对接电磁锁紧装置设计
doi: 10.11728/cjss2025.06.2024-0196 cstr: 32142.14.cjss.2024-0196
-
 赵俊杰 男, 1990年8月出生, 中国空气动力研究与发展中心低速所工程师, 主要从事流固耦合分析. E-mail: zhaojj15@lzu.edu.cn
赵俊杰 男, 1990年8月出生, 中国空气动力研究与发展中心低速所工程师, 主要从事流固耦合分析. E-mail: zhaojj15@lzu.edu.cn -
 吴福章 男, 1987年2月出生, 中国空气动力研究与发展中心低速所高级工程师, 主要从事动力模拟研究. E-mail: wufuzhang208@163.com
吴福章 男, 1987年2月出生, 中国空气动力研究与发展中心低速所高级工程师, 主要从事动力模拟研究. E-mail: wufuzhang208@163.com
作者简介:
Research on the Electromagnetic Locking Device Design for Aerial Towed System Probe Docking
-
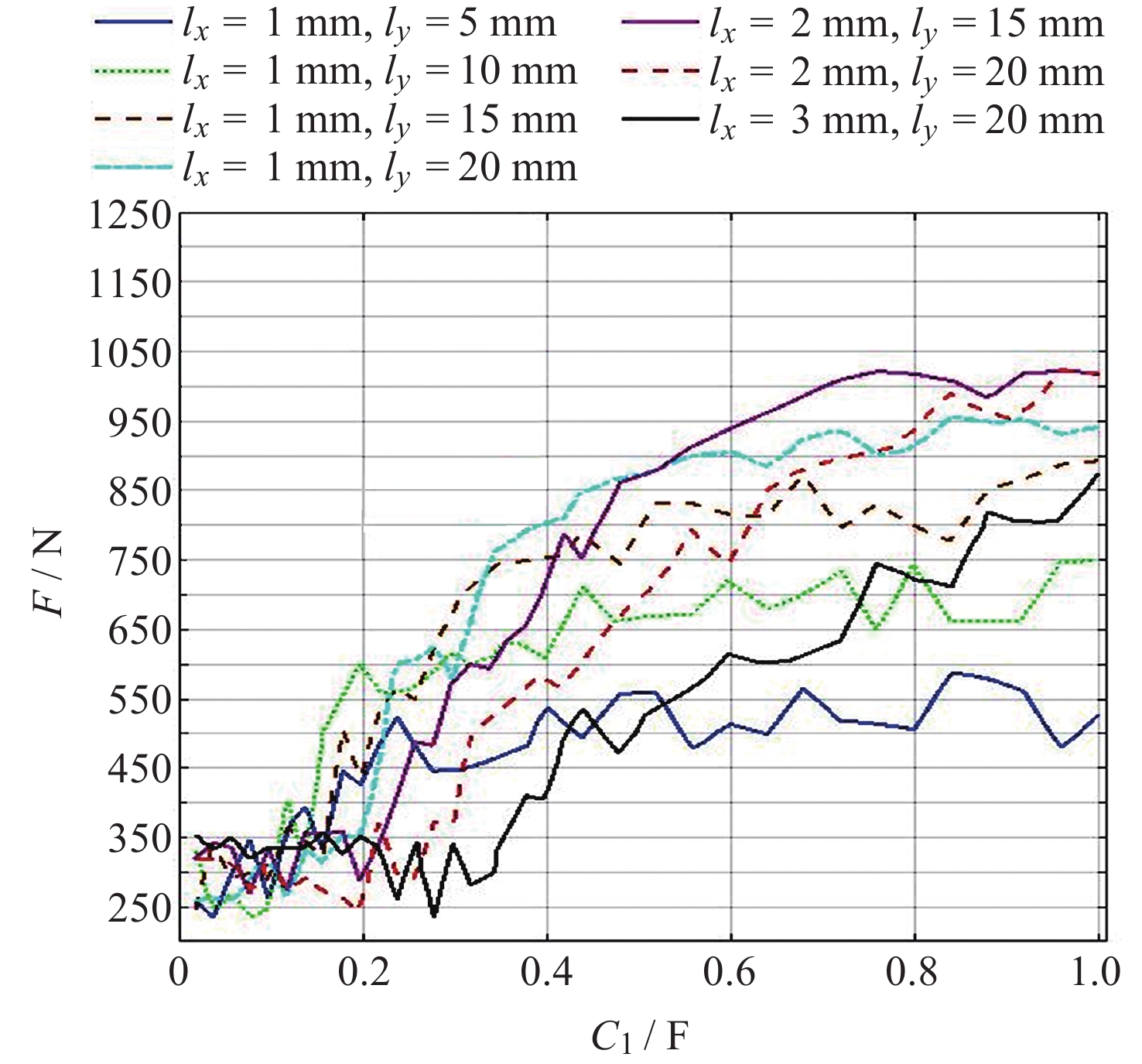
摘要: 空中拖曳系统是由拖曳飞行器平台、绳缆和拖曳体组成, 可以执行物资运输、载荷回收等任务, 显著拓展了空中作业空间范围. 拖曳体和拖曳飞行器平台连接过程中, 受拖曳飞行器平台尾流场以及柔性绳缆受气流因素干扰, 致使拖曳体连接过程存在困难, 需要对对接方式进行详细研究. 以空中拖曳锥杆式对接方式为研究对象, 设计了一种锥杆式对接电磁锁紧装置, 给出了快速锁紧与紧急释放的电磁锁紧原理. 通过建立对接过程有限元模型, 以电磁力作为变元进行参数化研究, 获得了电磁对接装置的响应数据. 采用电容供电情形下, 在电容0.5 F以上时, 2 mm×15 mm线规条件下电磁力最大可以达到1000 N以上. 所设计的拖曳锥杆式对接电磁锁紧装置, 为空中对接装置设计提供了新思路.Abstract: The aerial towing system consists of a towing aircraft platform, a cable, and a towed body. It can perform tasks such as material transportation and load recovery, significantly expanding the scope of aerial operation space. During the connection process between the towed body and the towing aircraft platform, the towed body faces difficulties in connection due to the interference from the wake flow field of the towing aircraft platform and the influence of airflow on the flexible cable. Therefore, a detailed study on the docking method is required. The research object is the aerial towed system probe docking. An electromagnetic locking device is designed. The electromagnetic locking principle of rapid locking and emergency release is given. By establishing the finite element model considering the docking process, the response data of the electromagnetic docking mechanism is obtained considering the electromagnetic force as a variable. When the capacitor is used for power supply, the maximum electromagnetic force can reach more than 1000 N under the condition of 2 mm×15 mm wire gauge when the capacitor is above 0.5 F. This docking electromagnetic locking device in this paper provides a new idea for the air docking design.
-
Key words:
- Probe docking /
- Electromagnetic locking /
- Finite element
-
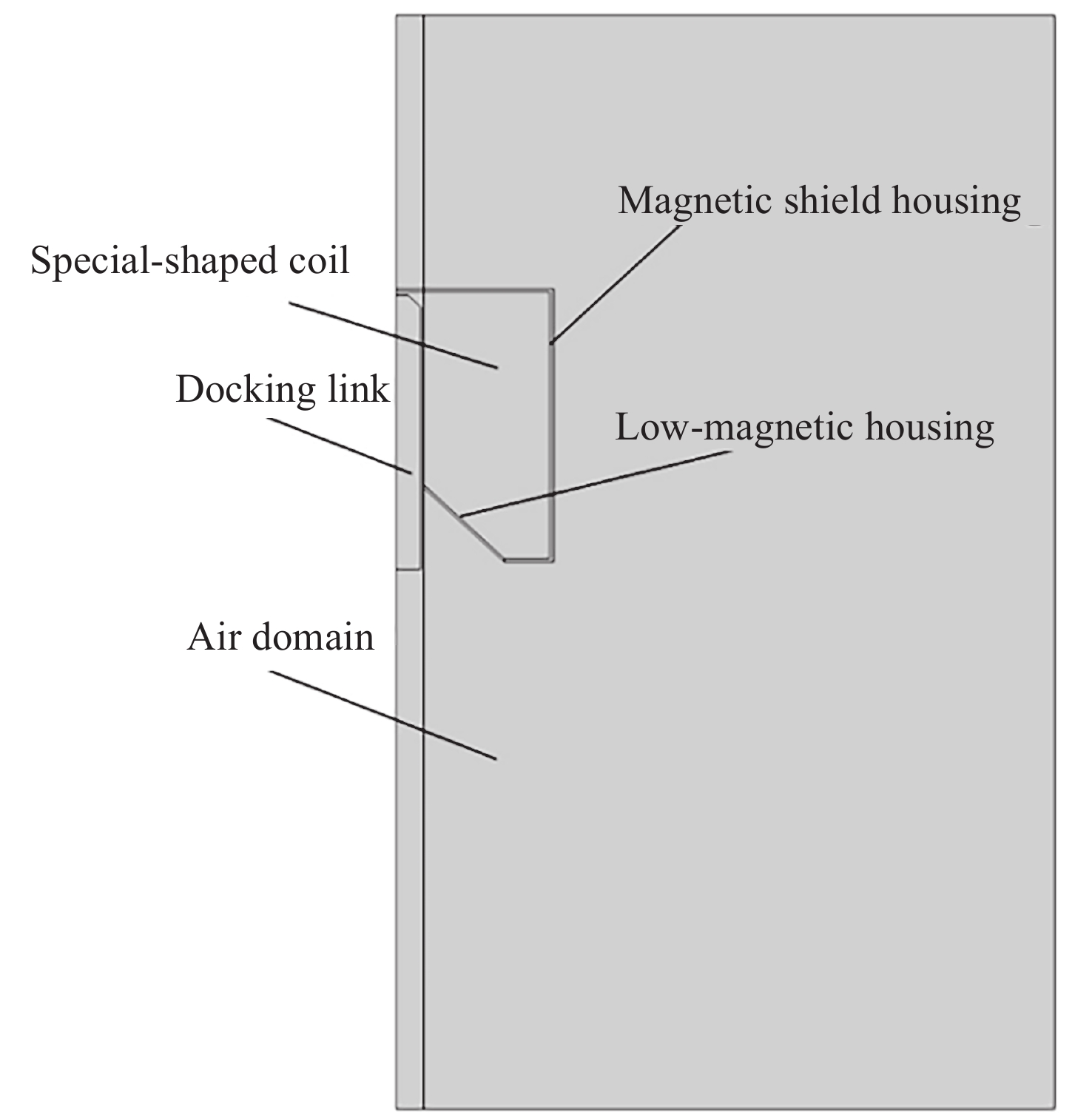
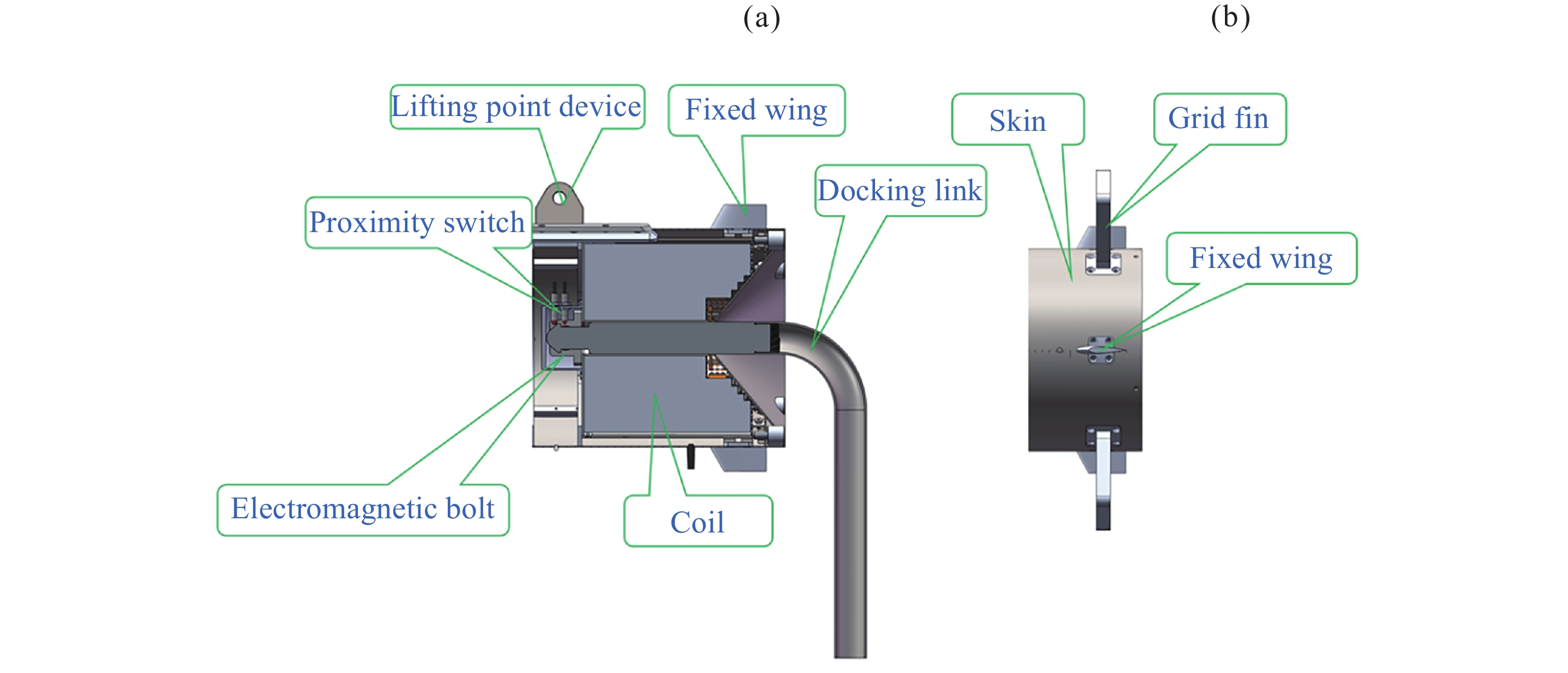
图 1 锥杆式对接电磁锁紧装置内部结构局部剖面(a)与去除L型锥杆后的局部整体(b)
Figure 1. Partial sectional view of the structure of electromagnetic locking device for probe docking (a) and a partial overall view after removing the L-shaped probe docking (b)
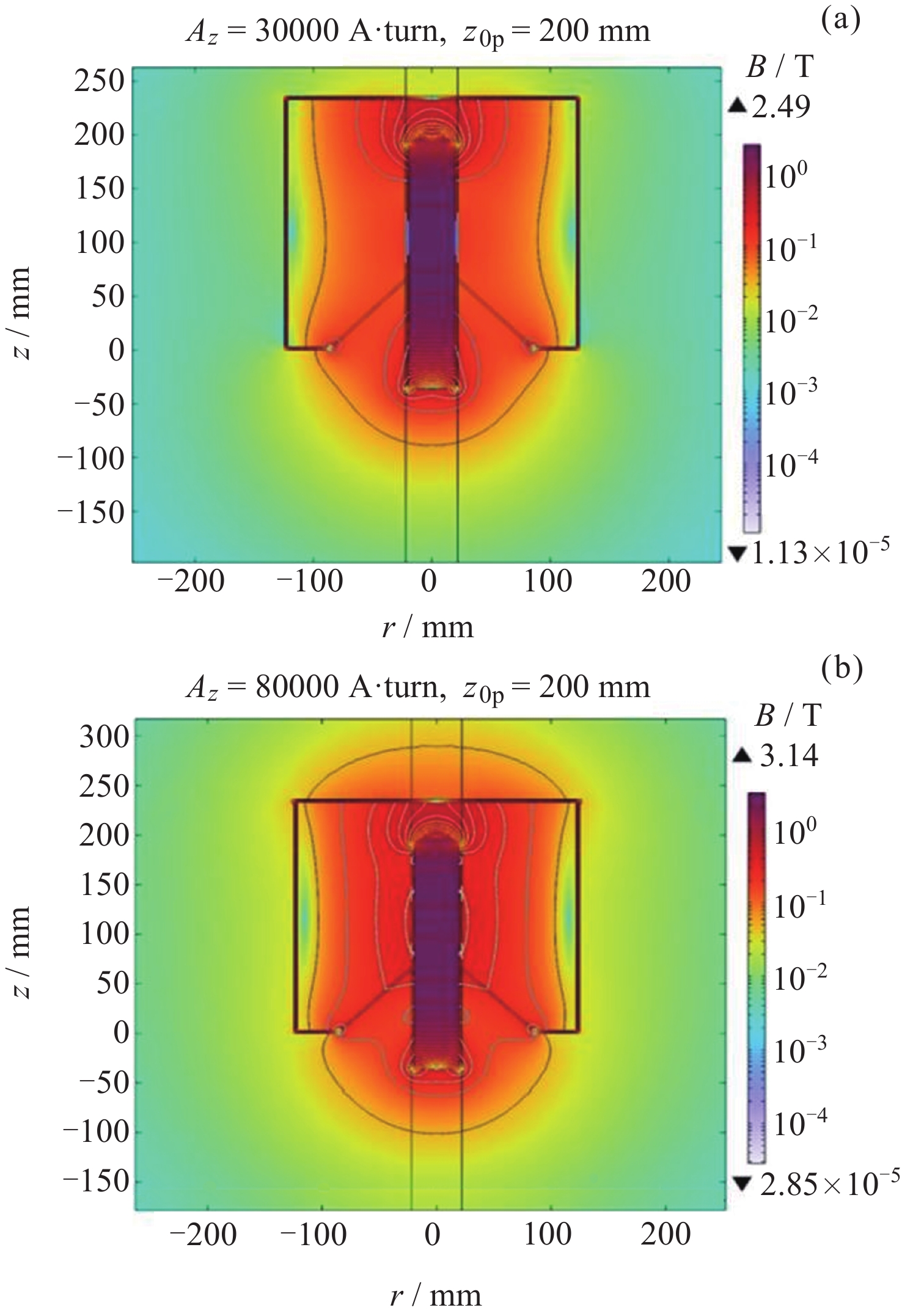
图 5 电磁锁紧装置截面磁场分布
Figure 5. Cross-sectional magnetic field distribution of the electromagnetic locking device
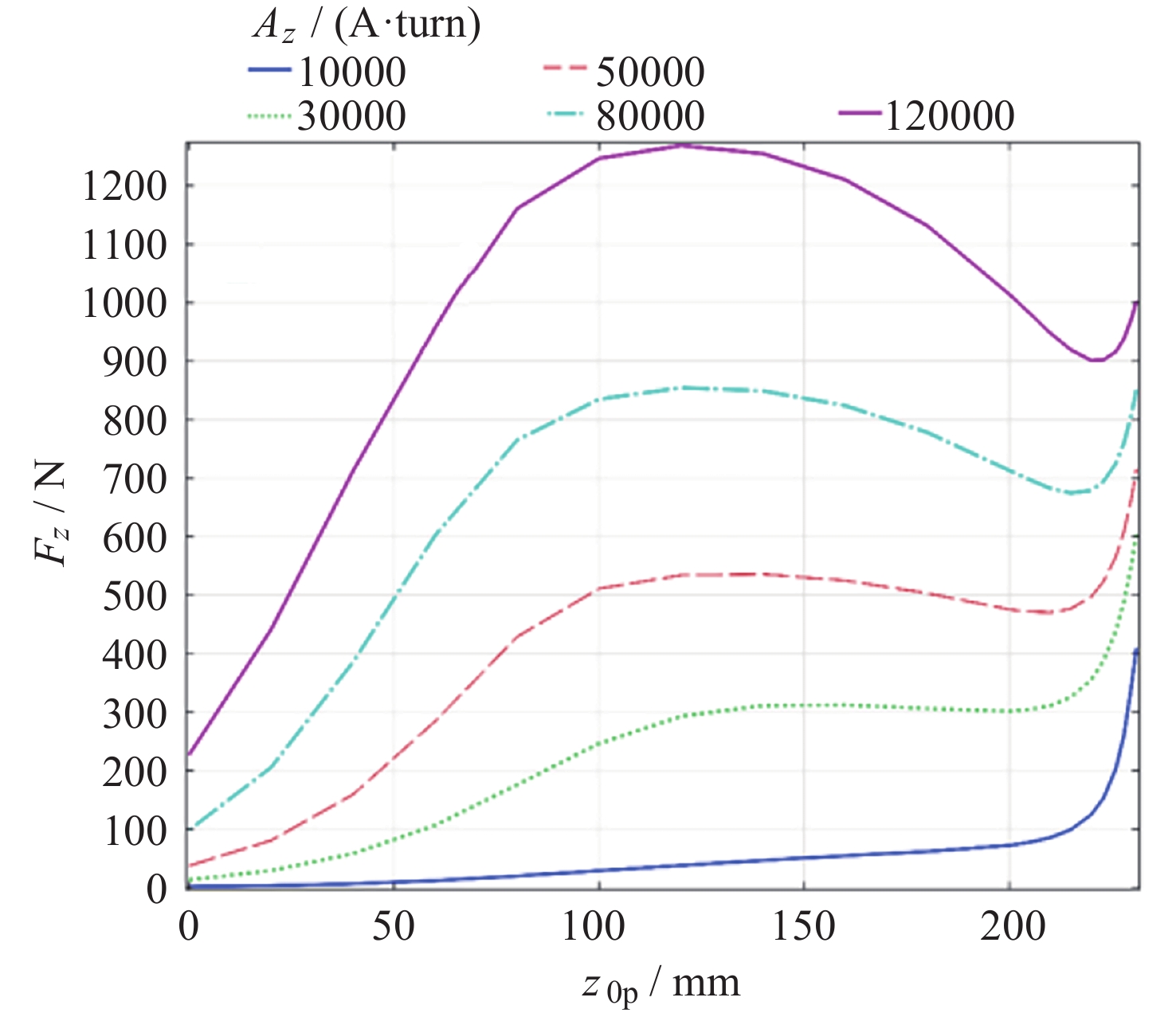
图 6 不同电流条件下电磁力随对接连杆位置变化
Figure 6. Diagram of electromagnetic force variation with docking rod position under different current conditions
图 7 对接连杆所受电磁力与其直径的关系
Figure 7. Relationship between electromagnetic force and diameter of the docking rod
图 8 线圈电感与对接连杆所处位置的关系
Figure 8. Relationship between coil inductance and the position of the docking rod
图 10 不同线规条件下对接连杆运动至末端时间与电容的关系
Figure 10. Relationship between the cost time of the docking rod moving to the end and the capacitance size under the different wire gauge conditions
图 11 不同线规条件下对接连杆运动至末端时所受电磁力与电容关系
Figure 11. Relationship between the electromagnetic force and the capacitance size when the docking rod moves to the end
表 1 电源直接对线圈供电情况下的相关技术参数
Table 1. Relevant technical parameters when the coil is directly powered by a power supply
lx /mm ly /mm R/Ω I/A U/V 匝数 安匝数 1 5 11.2 4.2 47.3 4111 17367 1 10 2.8 8.5 23.6 2040 17302 1 15 1.2 12.8 15.7 1348 17225 1 20 0.7 17.3 11.6 986 17011 2 15 0.3 25.8 7.7 660 17045 2 20 0.2 34.9 5.7 483 16837 3 20 0.1 52.3 3.8 322 16837  下载: 导出CSV
下载: 导出CSV
-
[1] 苏子康, 陈海通, 徐忠楠. 空中拖曳系统建模与控制技术研究进展[J]. 飞航导弹, 2021(7): 31-40SU Zikang, CHEN Haitong, XU Zhongnan. Research progress on modeling and control technology of aerial towing system[J]. Aerodynamic Missile Journal, 2021(7): 31-40 [2] HUYNH H T, MONTALVO C J. Dynamics of a multi-purpose lightweight towed system[C]//AIAA Atmospheric Flight Mechanics Conference. Denver, Colorado: AIAA, 2017. [3] 王宏伦, 王延祥, 刘一恒. 基于轨迹映射的无人机拖曳式空中回收轨迹优化[J]. 航空学报, 2023, 44(20): 1-17WANG Honglun, WANG Yanxiang, LIU Yiheng. Recovery trajectory optimization for UAV towed aerial recovery based on trajectory mapping[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(20): 1-17 [4] HOCHSTETLER R D, BOSMA J, CHACHAD G, et al. Lighter-than-air (LTA)“Airstation”-unmanned aircraft system (UAS) carrier concept[C]//proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference. Washington, DC: AIAA, 2016: 4223. [5] 闫留浩, 袁锁中. 无人机空中回收视觉导航技术[J]. 兵工自动化, 2022, 41(12): 56-60.YAN Liuhao, YUAN Suozhong. Vision navigation technology for UAV aerial recovery[J]. Ordnance Industry Automation, 2022, 41(12): 56-60 [6] 赵航, 廖鹏, 姚磊江. 基于计算流体力学的空中回收锥套气动特性分析[J]. 科学技术与工程, 2020, 20(4): 1684-1689ZHAO Hang, LIAO Peng, YAO Leijiang. Analysis of aerodynamic characteristics of drogues for air recycling based on computational fluid dynamics[J]. Science Technology and Engineering, 2020, 20(4): 1684-1689 [7] 陈海通, 苏子康, 李春涛, 李雪兵, 孟冲, 张朋. 空基回收拖曳系统直线-盘旋转接段运动轨迹设计[J]. 北京航空航天大学学报, 2024, 50(8): 2565-2574CHEN Haitong, SU Zikang, LI Chuntao, et al. Trajectory design for straight-circulating flight transition of aerial recovery towing system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(8): 2565-2574 [8] 楼雨涵, 解志坚, 杨臻, 等. 空间对接电磁锁紧机构研究[J]. 兵器装备工程学报, 2020, 41(12): 113-117,148LOU Yuhan, XIE Zhijian, YANG Zhen, et al. Research on space docking electromagnetic locking mechanism[J]. Journal of Ordnance Equipment Engineering, 2020, 41(12): 113-117,148 [9] 黄奕勇, 李强, 陈小前, 等. 自主在轨服务航天器空间对接过程建模与仿真[J]. 计算机仿真, 2011, 28(10): 57-60,106HUANG Yiyong, LI Qiang, CHEN Xiaoqian, et al. Modeling and simulating of independent on- orbit servicing spacecrafts' docking process[J]. Computer Simulation, 2011, 28(10): 57-60,106 [10] 王昊东, 杨臻, 武国梁. 基于ADAMS的卫星对接机构球锁装置动力学分析[J]. 兵器装备工程学报, 2019, 40(10): 45-49WANG Haodong, YANG Zhen, WU Guoliang. Dynamic analysis of ball locking device of satellite docking mechanism based on ADAMS[J]. Journal of Ordnance Equipment Engineering, 2019, 40(10): 45-49 [11] 杨泽川, 罗汝斌, 廖鹤, 等. 空间重复锁紧技术综述[J]. 航天返回与遥感, 2019, 40(4): 10-21YANG Zechuan, LUO Rubin, LIAO He, et al. Overview of Reusable Locking Technology in Space[J]. Spacecraft Recovery :Times New Roman;">& Remote Sensing, 2019, 40(4): 10-21 -
-

 下载:
下载:

计量
- 文章访问数: 288
- HTML全文浏览量: 66
- PDF下载量: 15
-
被引次数:
0(来源:Crossref)
0(来源:其他)

