


Research on Attitude Maneuver and Vibration of Liquid-filled Flexible Spacecraft Based on Terminal Sliding Mode Control
-
摘要: 对存在未知外界干扰、参数不确定问题的刚–液–柔多体耦合航天器姿态控制进行了研究。将液体燃料的晃动等效为球摆模型,挠性附件假设为欧拉–伯努利梁,运用拉格朗日方法建立航天器的动力学方程。将外界干扰、航天器转动惯量的参数不确定性以及液体晃动和挠性附件振动带来的耦合干扰归结为集总干扰,设计干扰观测器对其进行补偿;在干扰观测器的基础上,设计一种模糊滑模控制律。在原有的终端滑模控制基础上采用模糊控制对切换增益进行改进,达到抑制系统抖动的目的。数值仿真结果表明:所设计的模糊终端滑模控制律不仅能够实现充液挠性航天器的姿态机动,而且能够有效抑制液体晃动和挠性附件的振动,具有更好的控制性能。
-
关键词:
- 刚–液–柔耦合航天器 /
- 姿态机动 /
- 干扰观测器 /
- 终端滑模控制 /
- 模糊控制
Abstract: In this paper, the attitude control of rigid-liquid-flexible multi-body coupling spacecraft with unknown external disturbances and uncertain inertia parameters is studied, and an attitude maneuver control method based on disturbance observer and fuzzy terminal sliding mode control is proposed. The sloshing of liquid fuel in the spacecraft is equivalent to a spherical pendulum model, and the flexible appendages are assumed to be an Euler-Bernoulli beam. The coupled dynamic equation of the liquid-filled flexible spacecraft is derived by using the Lagrange method. First of all, the interference from space, the parameter uncertainty of the moment of inertia of the spacecraft, the coupling interference caused by the liquid sloshing and the vibration of flexible accessories are summed up as lumped interference. Design disturbance observer to compensate and estimate the lumped disturbance of the system. Then, based on the designed disturbance observer, a fuzzy terminal sliding mode control law is presented, and it is proved that the state of the closed-loop system is finite-time stable under the control law, and converges to the specified terminal sliding mode surface. The fuzzy terminal sliding mode control law uses fuzzy control to improve the switching gain based on the traditional terminal sliding mode control to achieve the purpose of suppressing system jitter. This optimization method can not only reduce the complexity of terminal sliding mode control method, but also reduce the difficulty of debugging parameters because it does not introduce new functions. The numerical simulation results show that the designed fuzzy terminal sliding mode control law can not only achieve the finite-time stability of the closed-loop attitude control system of the liquid-filled flexible spacecraft, but also effectively suppress the liquid sloshing and the vibration of the flexible appendages. At the same time, it has good robustness to disturbances caused by external disturbances and parameter uncertainties, and has better control performance. -
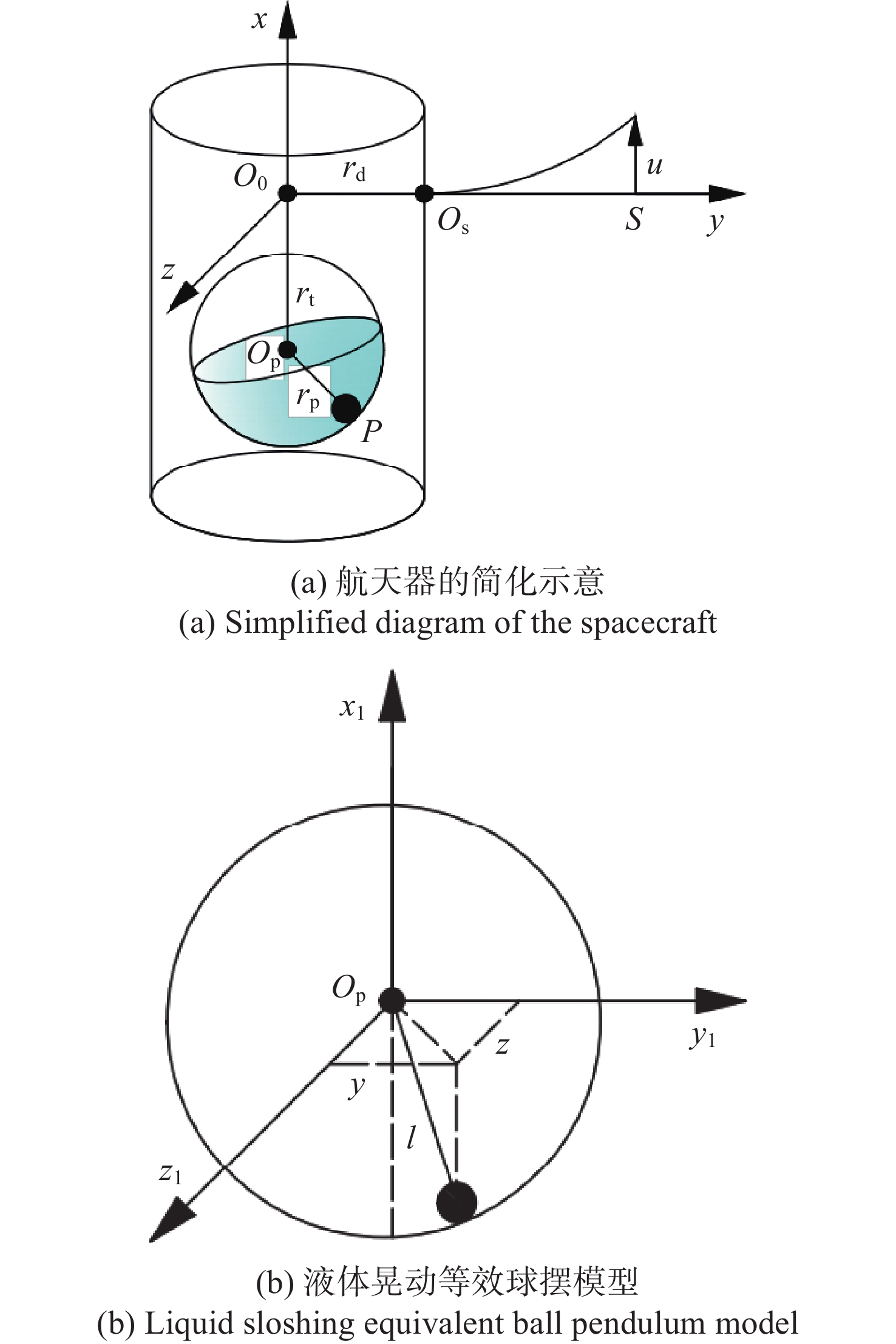
图 1 充液挠性航天器及力学模型
Figure 1. Schematic diagram and mechanical model of liquid-filled flexible spacecraft
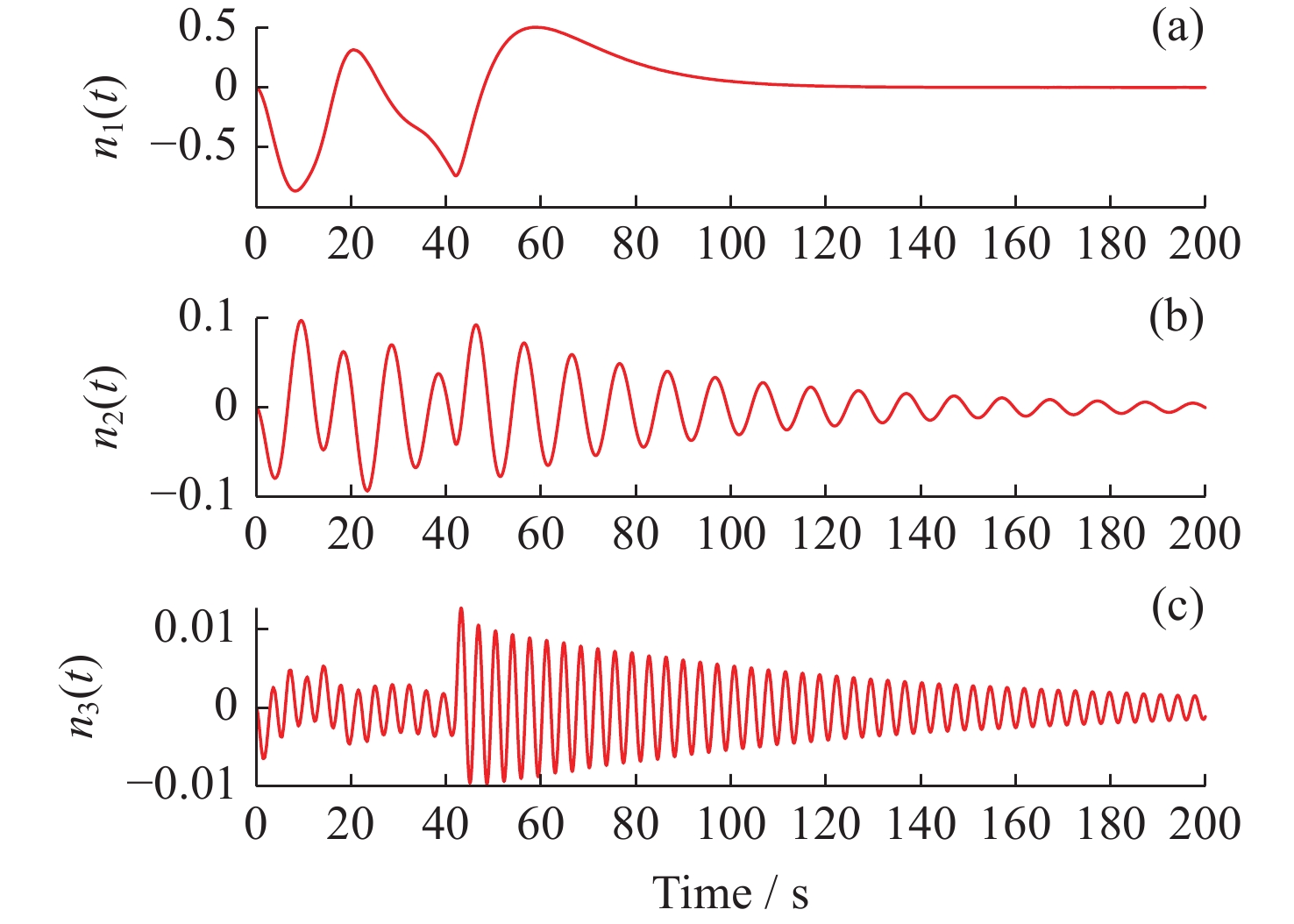
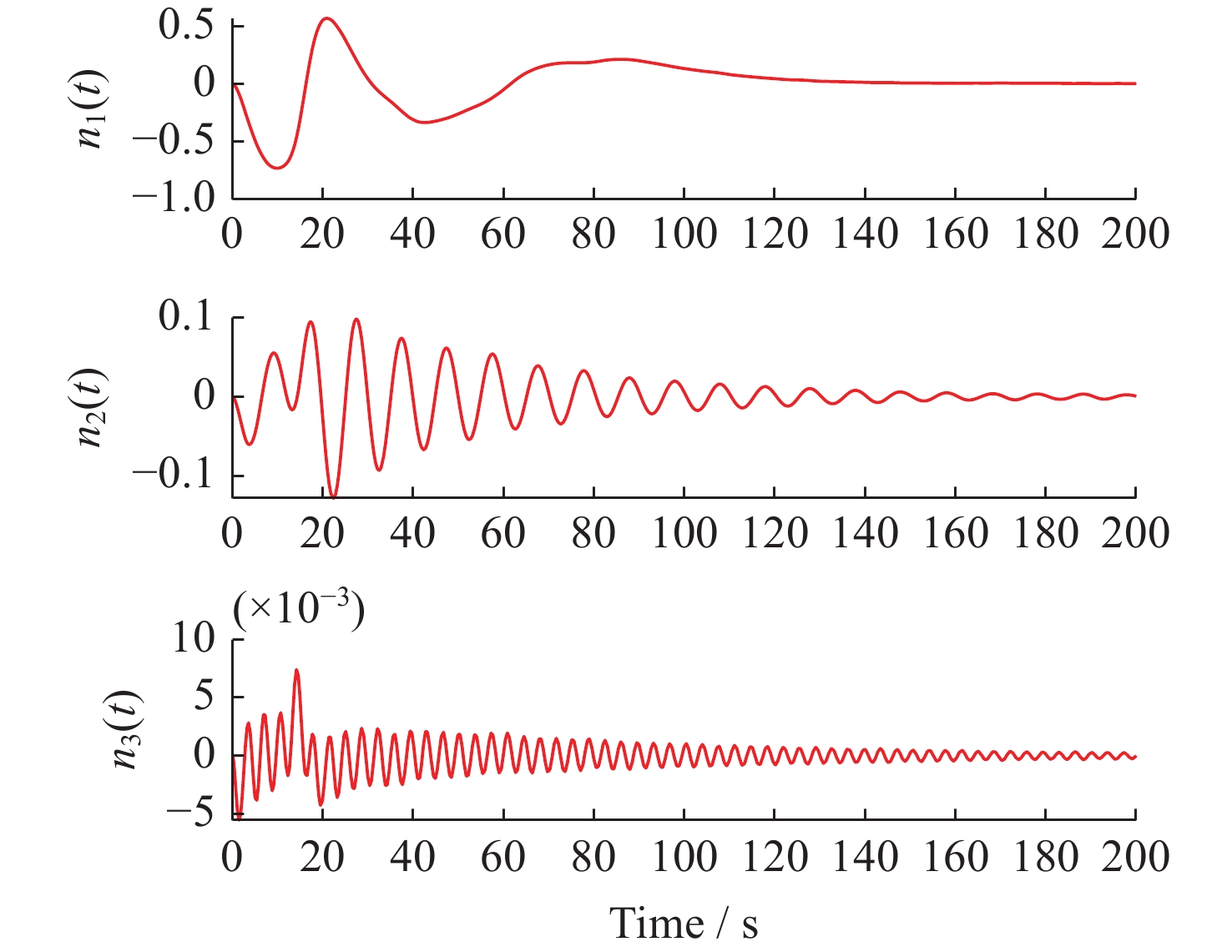
图 10 情形一挠性附件的三阶模态坐标响应
Figure 10. Third order mode coordinate response of flexible attachment in Case 1
-
[1] REYHANOGLU M, HERVAS J R. Robotically controlled sloshing suppression in point-to-point liquid container transfer[J]. Journal of Vibration and Control, 2013, 19(14): 2137-2144 doi: 10.1177/1077546312456865 [2] 宋晓娟, 王宏伟, 岳宝增. 测量不确定的充液航天器自适应鲁棒容错控制[J]. 宇航学报, 2022, 43(5): 638-648SONG Xiaojuan, WANG Hongwei, YUE Baozeng. Adaptive robust fault tolerant control of liquid-filled spacecraft with measurement uncertainty[J]. Journal of Astronautics, 2022, 43(5): 638-648 [3] DENG M L, YUE B Z. Attitude dynamics and control of liquid filled spacecraft with large amplitude fuel slosh[J]. Journal of Mechanics, 2017, 33(1): 125-136 doi: 10.1017/jmech.2016.60 [4] 邓明乐, 岳宝增, 黄华. 液体大幅晃动类等效力学模型研究[J]. 宇航学报, 2016, 37(6): 631-638DENG Mingle, YUE Baozeng, HUANG Hua. Study on the equivalent mechanical model for large amplitude slosh[J]. Journal of Astronautics, 2016, 37(6): 631-638 [5] NAVABI M, DAVOODI A, REYHANOGLU M. Optimum fuzzy sliding mode control of fuel sloshing in a spacecraft using PSO algorithm[J]. Acta Astronautica, 2020, 167: 331-342 doi: 10.1016/j.actaastro.2019.11.017 [6] 刘峰, 岳宝增, 马伯乐, 等. 燃料消耗下充液航天器等效动力学建模与分析[J]. 力学学报, 2020, 52(5): 1454-1464LIU Feng, YUE Baozeng, MA Bole, et al. Equivalent dynamics modeling and analysis of liquid-filled spacecraft with fuel consumption[J]. Chinese Journal of Theoretical and Applied Mechanics, 2020, 52(5): 1454-1464 [7] 于强, 王天舒. 充液航天器变质量液体大幅晃动的SPH分析方法[J]. 宇航学报, 2021, 42(1): 22-30 doi: 10.3873/j.issn.1000-1328.2021.01.003YU Qiang, WANG Tianshu. SPH method for large-amplitude liquid sloshing with variable mass in liquid-filled spacecraft[J]. Journal of Astronautics, 2021, 42(1): 22-30 doi: 10.3873/j.issn.1000-1328.2021.01.003 [8] 闫玉龙, 申云峰, 岳宝增. 含板类柔性附件的充液航天器动力学研究[J]. 宇航学报, 2020, 41(5): 531-540YAN Yulong, SHEN Yunfeng, YUE Baozeng. Research on dynamics of liquid-filled spacecraft carrying plate-type flexible appendages[J]. Journal of Astronautics, 2020, 41(5): 531-540 [9] 朱志浩, 郭毓, 陈庆伟. 多模态充液挠性航天器有限时间控制[J]. 南京理工大学学报, 2020, 44(2): 134-141ZHU Zhihao, GUO Yu, CHEN Qingwei. Finite-time control for multiple model liquid-filled flexible spacecraft[J]. Journal of Nanjing University of Science and Technology, 2020, 44(2): 134-141 [10] DOU Liqian, DU Miaomiao, ZHANG Xiuyun, et al. Fuzzy disturbance observer-based sliding mode control for liquid-filled spacecraft with flexible structure under control saturation[J]. IEEE Access, 2019, 7: 149810-149819 doi: 10.1109/ACCESS.2019.2946961 [11] 宋晓娟, 王宏伟, 吕书锋. 输入饱和的充液航天器抗干扰有限时间滑模控制[J]. 控制与决策, 2021, 36(5): 1078-1086SONG Xiaojuan, WANG Hongwei, LV Shufeng. Anti-disturbance finite-time sliding mode control for liquid-filled spacecraft with input saturation[J]. Control and Decision, 2021, 36(5): 1078-1086 [12] 王雪冰, 吴忠. 基于干扰观测器的挠性卫星姿态滑模变结构控制[J]. 空间控制技术与应用, 2017, 43(2): 36-42 doi: 10.3969/j.issn.1674-1579.2017.02.006WANG Xuebing, WU Zhong. Attitude control of flexible satellites via disturbance-observer-based sliding mode controller[J]. Aerospace Control and Application, 2017, 43(2): 36-42 doi: 10.3969/j.issn.1674-1579.2017.02.006 [13] 秦利, 刘福才, 梁利环, 等. 基于液体晃动干扰观测器的航天器混沌姿态H∞控制[J]. 物理学报, 2014, 63(9): 090502 doi: 10.7498/aps.63.090502QIN Li, LIU Fucai, LIANG Lihuan, et al. H∞ control for spacecraft chaotic attitude motion by liquid sloshing disturbance observer[J]. Acta Physica Sinica, 2014, 63(9): 090502 doi: 10.7498/aps.63.090502 [14] 蔡远利, 李慧洁. 终端滑模控制研究与发展现状[C]//中国自动化学会系统仿真专业委员会. 第19届中国系统仿真技术及其应用学术年会论文集. 合肥: 中国科学技术大学出版社, 2018: 12-16CAI Yuanli, LI Huijie. Research and development status of terminal sliding mode control[C]//System Simulation Professional Committee of China Association of Automation. Proceedings of the 19 th Chinese Annual Conference on System Simulation Technology and Its Application. Hefei: University of Science and Technology of China Press, 2018: 12-16 [15] 袁利, 马广富, 董经纬, 等. 航天器近距离交会的固定时间终端滑模控制[J]. 宇航学报, 2018, 39(2): 195-205 doi: 10.3873/j.issn.1000-1328.2018.02.010YUAN Li, MA Guangfu, DONG Jingwei, et al. Fixed-time terminal sliding mode control for close-range rendezvous[J]. Journal of Astronautics, 2018, 39(2): 195-205 doi: 10.3873/j.issn.1000-1328.2018.02.010 [16] 朱庆华, 董瑞琦, 马广富. 基于动态滑模控制的挠性航天器姿态控制[J]. 控制理论与应用, 2018, 35(10): 1430-1435 doi: 10.7641/CTA.2018.70863ZHU Qinghua, DONG Ruiqi, MA Guangfu. Dynamical sliding mode for flexible spacecraft attitude control[J]. Control Theory & Applications, 2018, 35(10): 1430-1435 doi: 10.7641/CTA.2018.70863 [17] 岳宝增, 李晓玉. 航天器平移及姿态机动自适应终端滑模控制[J]. 动力学与控制学报, 2018, 16(4): 332-337YUE Baozeng, LI Xiaoyu. Adaptive terminal sliding mode control for spacecraft with translation and attitude maneuvers[J]. Journal of Dynamics and Control, 2018, 16(4): 332-337 [18] 马广富, 朱庆华, 王鹏宇, 等. 基于终端滑模的航天器自适应预设性能姿态跟踪控制[J]. 航空学报, 2018, 39(6): 321763 doi: 10.7527/S1000-6893.2018.21763MA Guangfu, ZHU Qinghua, WANG Pengyu, et al. Adaptive prescribed performance attitude tracking control for spacecraft via terminal sliding-mode technique[J]. Acta Aeronauticaet Astronautica Sinica, 2018, 39(6): 321763 doi: 10.7527/S1000-6893.2018.21763 [19] ZOU A M, DEV KUMAR K, HOU Z G, et al. Finite-time attitude tracking control for spacecraft using terminal sliding mode and Chebyshev neural network[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2011, 41(4): 950-963 doi: 10.1109/TSMCB.2010.2101592 [20] 李升波, 李克强, 王建强, 等. 非奇异快速的终端滑模控制方法[J]. 信息与控制, 2009, 38(1): 1-8 doi: 10.3969/j.issn.1002-0411.2009.01.001LI Shengbo, LI Keqiang, WANG Jianqiang, et al. Nonsingular and fast terminal sliding mode control method[J]. Information and Control, 2009, 38(1): 1-8 doi: 10.3969/j.issn.1002-0411.2009.01.001 [21] BHAT S P, BERNSTEIN D S. Finite-time stability of continuous autonomous systems[J]. SIAM Journal on Control and Optimization, 2000, 38(3): 751-766 doi: 10.1137/S0363012997321358 [22] 支敬德, 戈新生. 基于模糊滑模控制的挠性航天器姿态机动及抖振抑制研究[J]. 应用力学学报, 2020, 37(5): 1972-1979 doi: 10.11776/cjam.37.05.D068ZHI Jingde, GE Xinsheng. Attitude maneuver and buffeting suppression of flexible spacecraft based on fuzzy sliding mode control[J]. Chinese Journal of Applied Mechanics, 2020, 37(5): 1972-1979 doi: 10.11776/cjam.37.05.D068 [23] 周湛杰, 王新生, 王岩. 基于模糊自适应算法的航天器姿态控制[J]. 电机与控制学报, 2019, 23(2): 123-128 doi: 10.15938/j.emc.2019.02.016ZHOU Zhanjie, WANG Xinsheng, WANG Yan. Spacecraft attitude control based on fuzzy adaptive algorithm[J]. Electric Machines and Control, 2019, 23(2): 123-128 doi: 10.15938/j.emc.2019.02.016 [24] 支敬德, 戈新生. 基于模糊PD控制的柔性航天器振动抑制研究[J]. 计算机仿真, 2022, 39(3): 52-56,209 doi: 10.3969/j.issn.1006-9348.2022.03.011ZHI Jingde, GE Xinsheng. Research on vibration suppression of flexible spacecraft based on fuzzy PD control[J]. Computer Simulation, 2022, 39(3): 52-56,209 doi: 10.3969/j.issn.1006-9348.2022.03.011 -
-

 下载:
下载:

图(15)
计量
- 文章访问数: 802
- HTML全文浏览量: 337
- PDF下载量: 37
-
被引次数:
0(来源:Crossref)
0(来源:其他)

