


空间机械臂操作子系统设计与实现
doi: 10.11728/cjss2024.05.2023-0081 cstr: 32142.14.cjss2024.05.2023-0081
-
 邱新安 男, 1988年12月出生于河南省信阳市, 现为中国空间技术研究院兰州空间技术物理研究所高级工程师, 主要研究方向为空间机械臂遥操作设计、空间人机交互技术等.E-mail: qiuxinan510@163.com
邱新安 男, 1988年12月出生于河南省信阳市, 现为中国空间技术研究院兰州空间技术物理研究所高级工程师, 主要研究方向为空间机械臂遥操作设计、空间人机交互技术等.E-mail: qiuxinan510@163.com -
 马动涛 男, 1976年10月出生于甘肃省兰州市, 现为中国空间技术研究院兰州空间技术物理研究所研究员, 主要研究方向为空间机械臂系统遥操作设计、空间结构与控制技术等. E-mail: madongtao@sina.com
马动涛 男, 1976年10月出生于甘肃省兰州市, 现为中国空间技术研究院兰州空间技术物理研究所研究员, 主要研究方向为空间机械臂系统遥操作设计、空间结构与控制技术等. E-mail: madongtao@sina.com
作者简介:
通讯作者:
Design and Implementation of Space Manipulator Operating Subsystem
-
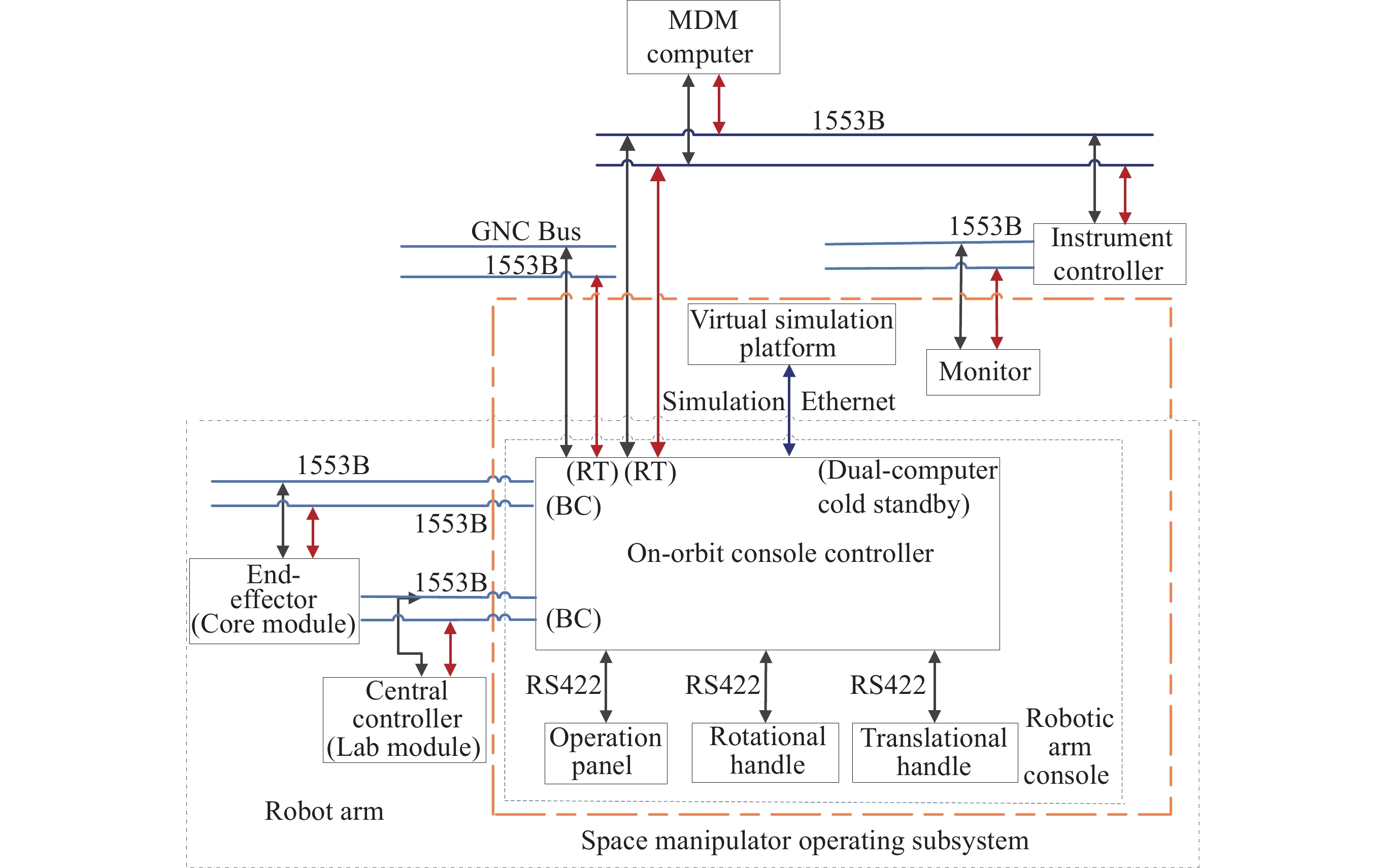
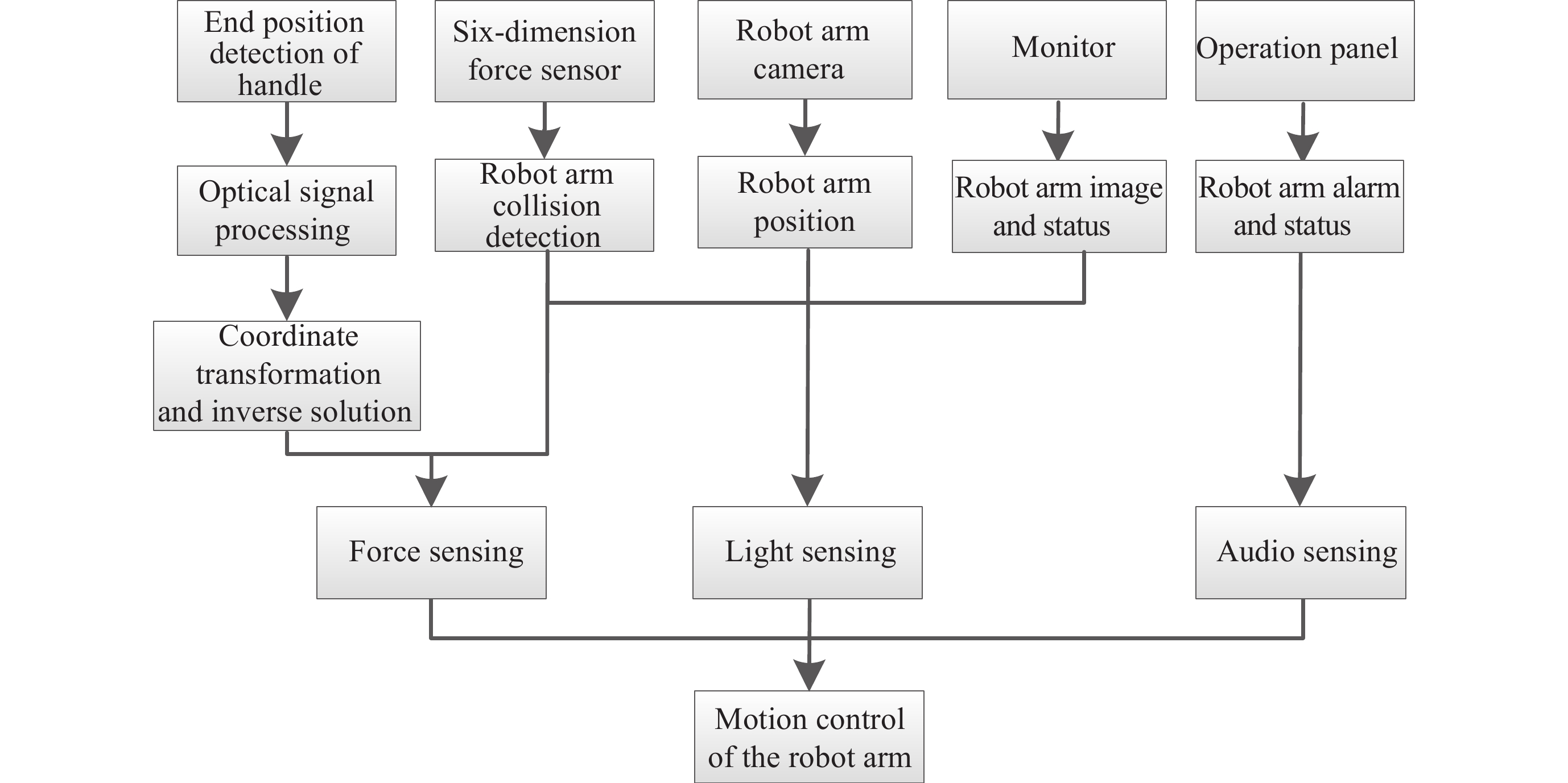
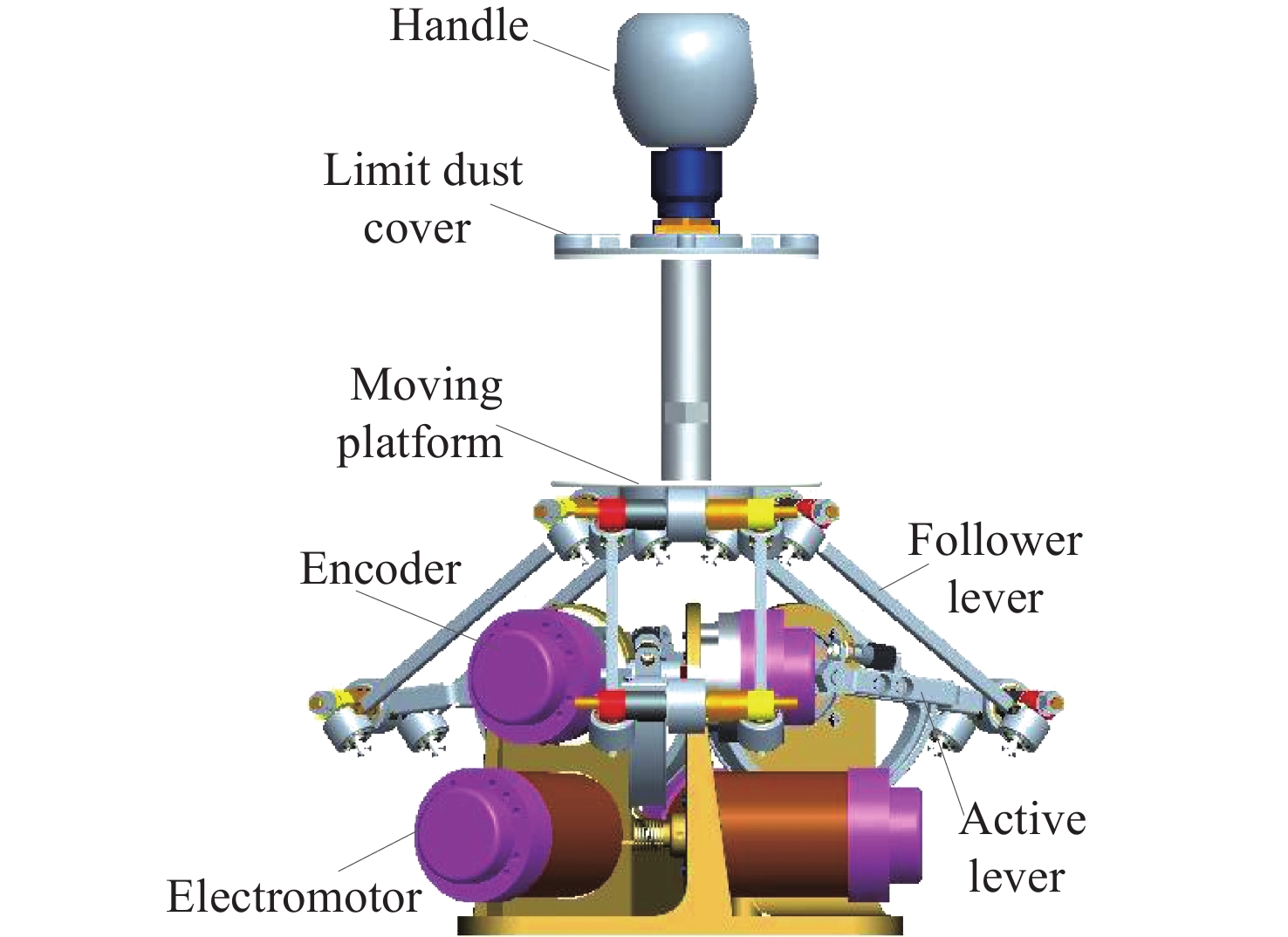
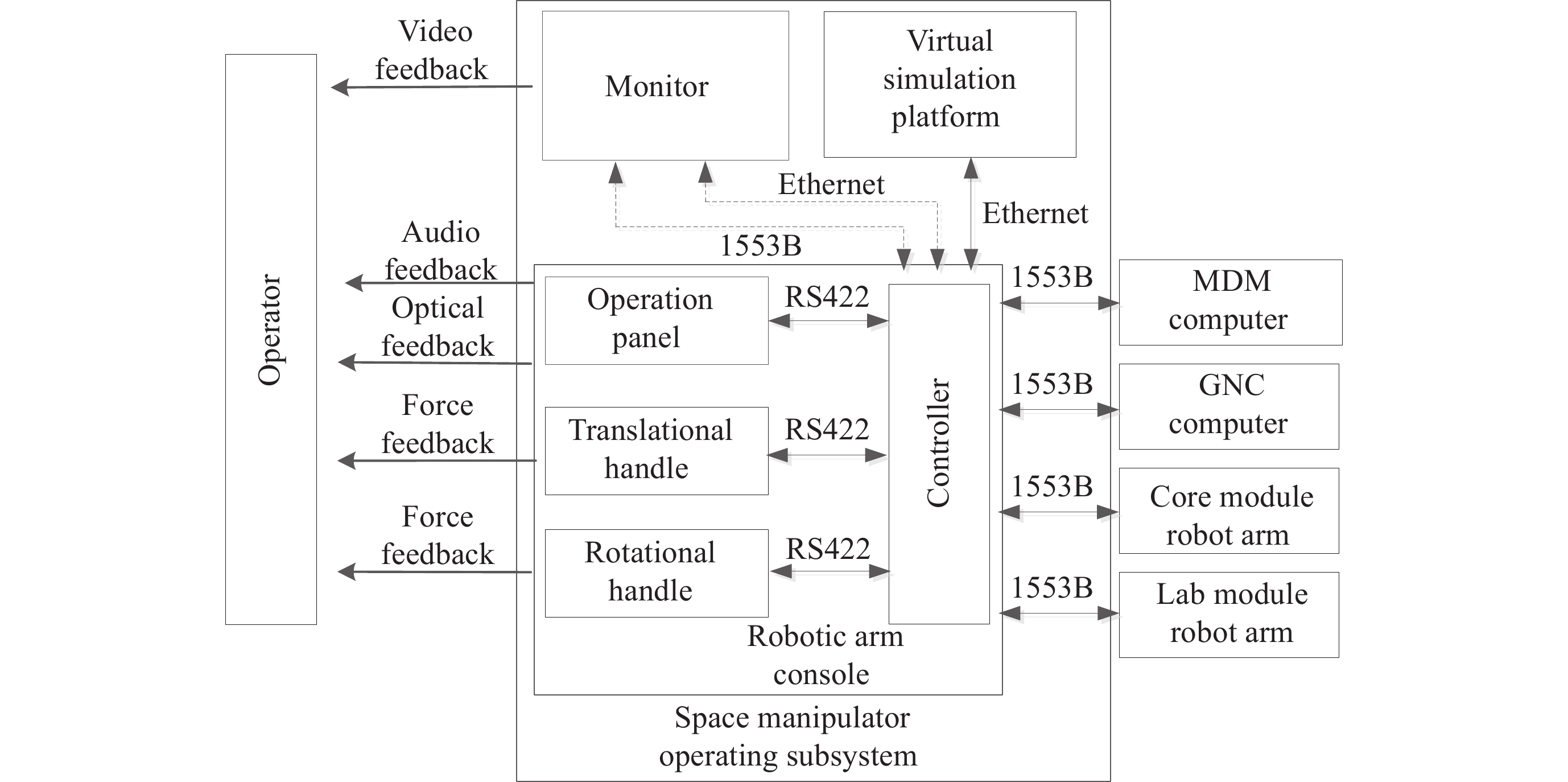
摘要: 空间机械臂作为中国空间站建设和在轨运营的重要平台, 具有自由度多、转动惯量大、操作精度高、模式多样等特点. 针对空间机械臂在轨任务特点, 建立了支持长期在轨、多模式工作的空间机械臂操作子系统. 该操作子系统由机械臂操作台、虚拟仿真平台、显示器等构成, 可满足多任务需求. 通过对操作子系统的架构、工作模式、技术特点的分析, 重点研究了操作子系统的多总线体系结构、多模态人机交互技术、力觉渲染算法, 并根据地面验证和在轨试验, 给出了空间机械臂操作子系统的验证情况. 结果表明, 空间机械臂操作子系统可有效模拟在轨任务, 准确完成对机械臂的控制与精细操作, 为支撑空间机械臂任务实施积累了经验和数据.Abstract: As an important platform for the construction and on-orbit operation of space station, the space manipulator operating subsystem is the first independently developed large-scale space robotic system for aerospace engineering applications in China. The space robot arm has 14 degrees of freedom under the combination of the two arms, with large motion inertia, high operating precision, and support for multi-mode work. In this paper, according to the characteristics of space manipulator on-orbit mission, a space manipulator operation subsystem is established, which is supporting long-term on-orbit and multi-mode operation. The operation subsystem is composed of manipulator console, virtual simulation platform and display, which can meet the requirements of multitasking. This paper provides a summarize overview of the architecture, working mode, and technical characteristics of the operation subsystem, and focuses on analyzing the system bus structure, multimodal human-computer interaction technology, and force perception rendering algorithms of the operation subsystem. According to the ground test and on-orbit work, the verification of space manipulator operation subsystem is obtained, which provides valuable experience and data for space manipulator operation mission. The results show that the space manipulator operating subsystem can better carry out on-orbit management of the space robotic arm, monitor the whole process of it, as well as ground and on-orbit remote control and manipulation; the application of force perception rendering technology can better support the fine manipulation of the space robotic arm end and joints; the virtual simulation platform can effectively simulate the on-orbit tasks of the space robotic arm and simulate the pre-task rehearsal and training of the support task. The space manipulator operating subsystem has accumulated experience and data to support space robotic arm mission implementation.
-
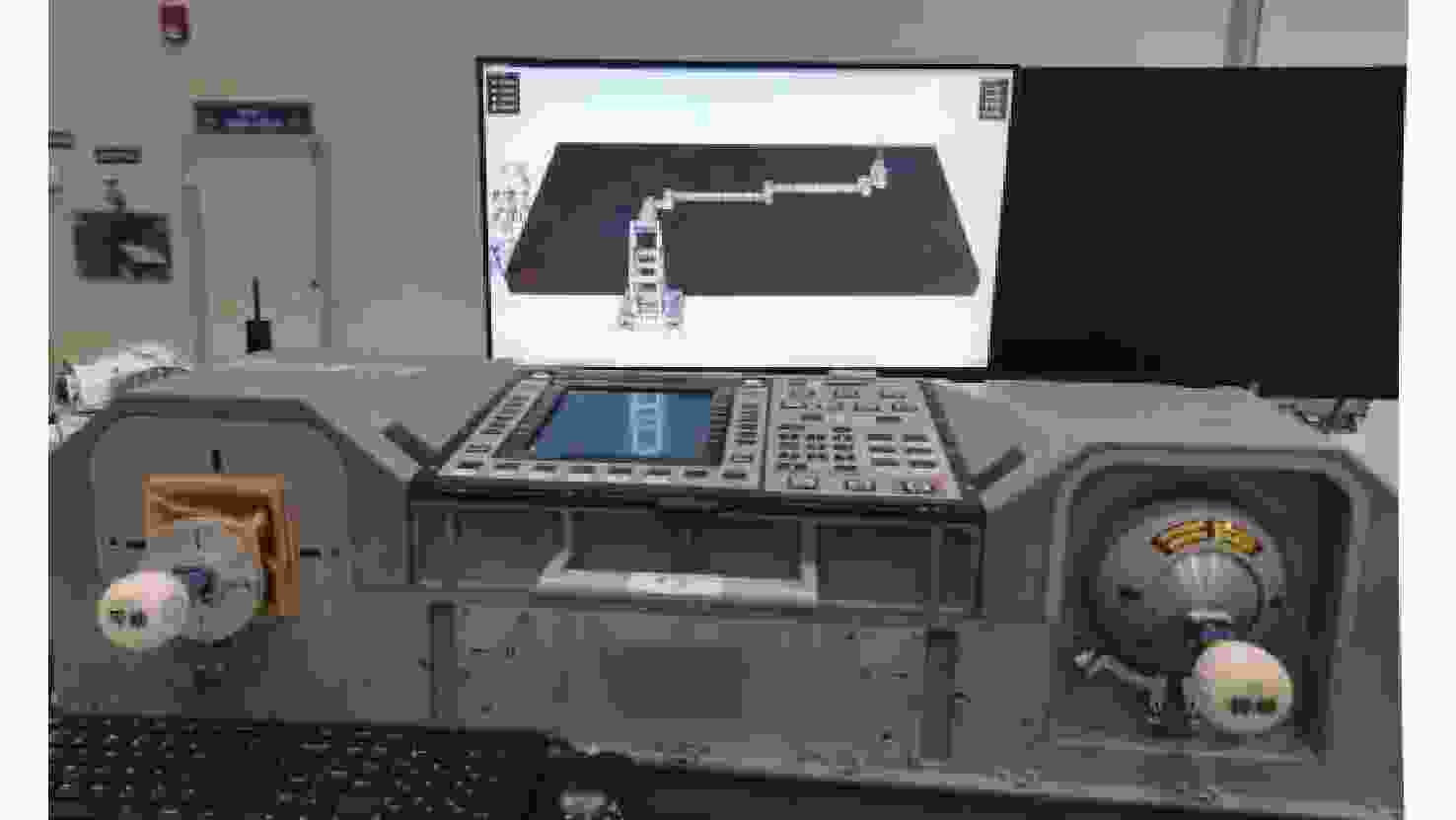
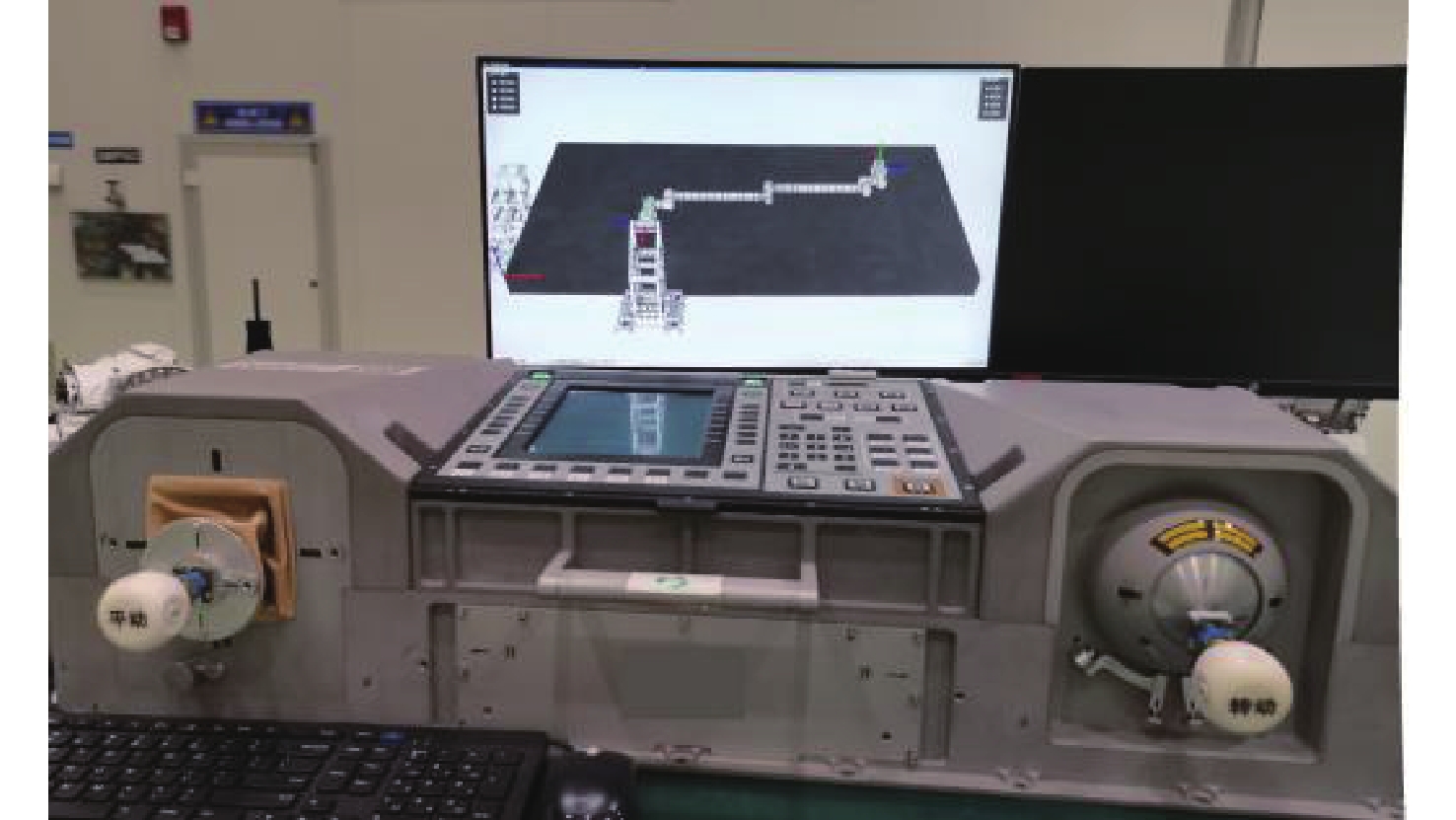
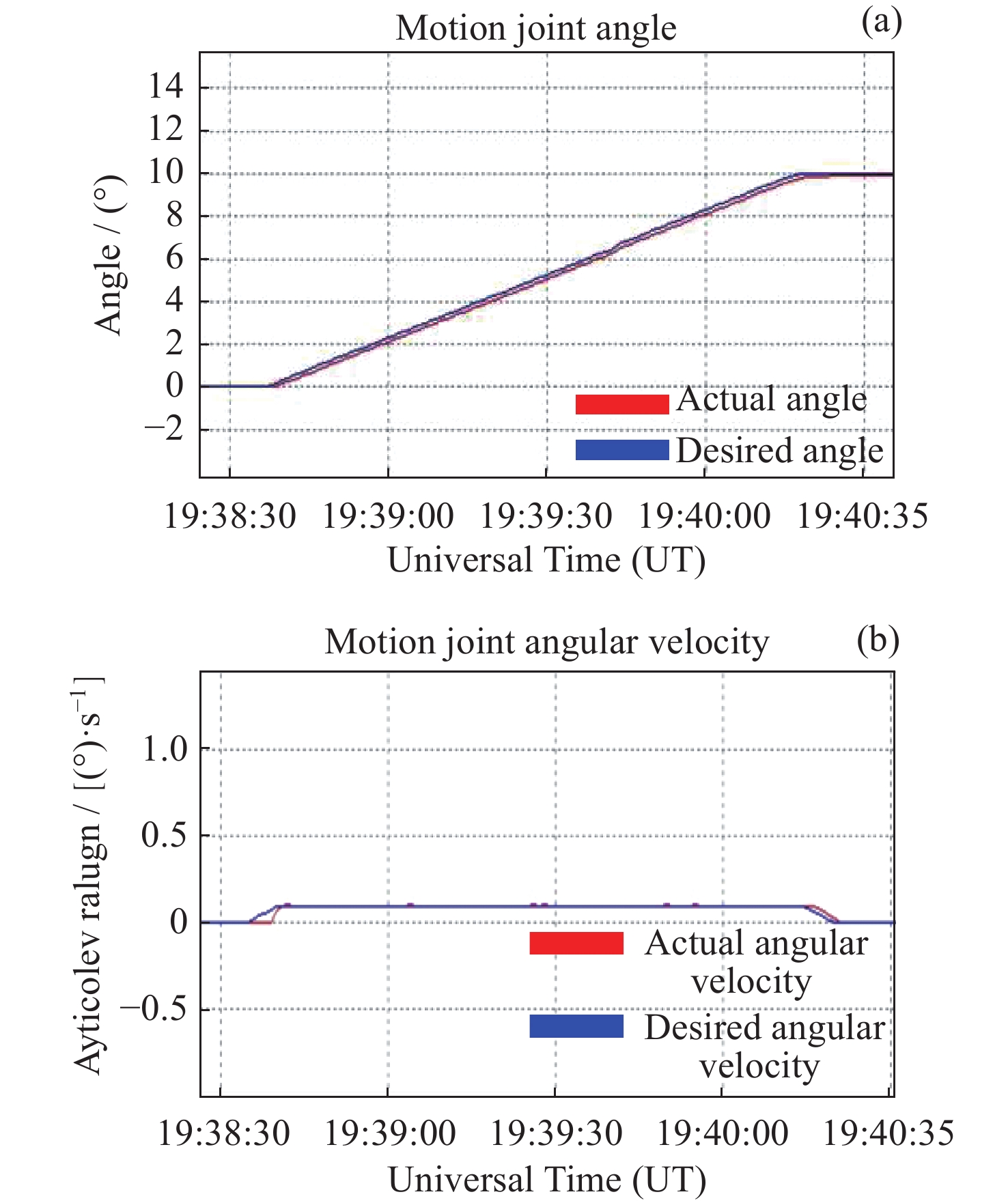
图 7 空间机械臂操控子系统地面验证试验
Figure 7. Ground-based verification tests of space manipulator operating subsystem
-
[1] 周建平. 我国空间站工程总体构想[J]. 载人航天, 2013, 19(2): 1-10 doi: 10.3969/j.issn.1674-5825.2013.02.001ZHOU Jianping. Chinese space station project overall vi-sion[J]. Manned Spaceflight, 2013, 19(2): 1-10 doi: 10.3969/j.issn.1674-5825.2013.02.001 [2] 李大明, 饶炜, 胡成威, 等. 空间站机械臂关键技术研究[J]. 载人航天, 2014, 20(3): 238-242 doi: 10.3969/j.issn.1674-5825.2014.03.010LI Daming, RAO Wei, HU Chengwei, et al. Key technology review of the research on the space station manipula-tor[J]. Manned Spaceflight, 2014, 20(3): 238-242 doi: 10.3969/j.issn.1674-5825.2014.03.010 [3] 朱超, 孔旭, 胡成威, 等. 空间机械臂维修性系统设计与评价体系的构建[J]. 航空学报, 2021, 42(1): 524002ZHU Chao, KONG Xu, HU Chengwei, et al. Maintainabi-lity system design and evaluation system construction for space manipulators[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 524002 [4] 刘宏, 刘冬雨, 蒋再男. 空间机械臂技术综述及展望[J]. 航空学报, 2021, 42(1): 524164LIU Hong, LIU Dongyu, JIANG Zainan. Space manipula-tor technology: Review and prospect[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(1): 524164 [5] 林益明, 李大明, 王耀兵, 等. 空间机器人发展现状与思考[J]. 航天器工程, 2015, 24(5): 1-7 doi: 10.3969/j.issn.1673-8748.2015.05.001LIN Yiming, LI Daming, WANG Yaobing, et al. Current status and analysis of space robot[J]. Spacecraft Engineering, 2015, 24(5): 1-7 doi: 10.3969/j.issn.1673-8748.2015.05.001 [6] 刘宏, 蒋再男, 刘业超. 空间机械臂技术发展综述[J]. 载人航天, 2015, 21(5): 435-443 doi: 10.3969/j.issn.1674-5825.2015.05.002LIU Hong, JIANG Zainan, LIU Yechao. Review of space manipulator technology[J]. Manned Spaceflight, 2015, 21(5): 435-443 doi: 10.3969/j.issn.1674-5825.2015.05.002 [7] JIA H L, ZHANG W M, HUANG Q, et al. Stiffness opti-mization design of a light space manipulator[C]//2007 IEEE International Conference on Automation and Logistics. Jinan: IEEE, 2007: 803-808 [8] REHNMARK F, SPAIN I, BLUETHMANN W, et al. An experimental investigation of robotic spacewalking[C]//4th IEEE/RAS International Conference on Humanoid Robots. Santa Monica: IEEE, 2004: 366-384 [9] MCGREGOR R, OSHINOWO L. Flight 6A: deployment and checkout of the space station remote manipulator system (SSRMS)[C]//Proceeding of the 6th International Symposium on Artificial Intelligence and Robotics & Automation in Space. St-Hubert, Canada: Canadian Space Agency, 2001 [10] ALBU-SCHAFFER A, BERTLEFF W, REBELE B, et al. ROKVISS – robotics component verification on ISS current experimental results on parameter identification[C]//Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006. Orlando: IEEE, 2006 [11] VAN WOERKOM P T L M, MISRA A K. Robotic manipulators in space: a dynamics and control perspective[J]. Acta Astronautica, 1996, 38(4/5/6/7/8): 411-421 [12] YOSHIDA K. Engineering test satellite VII flight experiments for space robot dynamics and control: theories on laboratory test beds Ten Years Ago, Now in Orbit[J]. The International Journal of Robotics Research, 2003, 22(5): 321-335 doi: 10.1177/0278364903022005003 [13] FUKUSHIMA Y, INABA N, ODA M. Capture and berthing experiment of a massive object using ETS-VII’s space robot-World’s first on-orbit satellite capture experiment by space robot system[C]//Astrodynamics Specialist Conference. Denver: AIAA, 2000 [14] HIRZINGER G, BRUNNER B, DIETRICH J, et al. Sensor-based space robotics-ROTEX and its telerobotic features[J]. IEEE Transactions on Robotics and Automation, 1993, 9(5): 649-663 doi: 10.1109/70.258056 [15] REINTSEMA D, LANDZETTEL K, HIRZINGER G. DLR’s advanced telerobotic concepts and experiments for on-orbit servicing[M]. Berlin: Springer, 2007: 323-345 [16] BOUMANS R, HEEMSKERK C. The European robotic arm for the international space station[J]. Robotics and Autonomous Systems, 1998, 23(1/2): 17-27 [17] 易润泽. 面向机器人遥操作的多模态人机交互技术[D]. 南京: 东南大学, 2018YI Runze. Multi-modal man-machine interaction technology for robotic teleoperation[D]. Nanjing: Southeast University, 2018 [18] 邱新安, 马动涛, 朱博, 等. 面向空间机械臂操作的力反馈手柄设计[J]. 航天器工程, 2020, 29(4): 66-73QIU Xin’an, MA Dongtao, ZHU Bo, et al. Design of force feedback handle for space manipulator operation[J]. Spacecraft Engineering, 2020, 29(4): 66-73 [19] 胡玉茜, 刘宾, 吴志红, 等. 空间大型机械臂地面测试验证方案设计与实现[J]. 航天器工程, 2021, 30(4): 151-158 doi: 10.3969/j.issn.1673-8748.2021.04.020HU Yuqian, LIU Bin, WU Zhihong, et al. Design and implementation of ground testing and verification scheme for large space manipulator[J]. Spacecraft Engineering, 2021, 30(4): 151-158 doi: 10.3969/j.issn.1673-8748.2021.04.020 [20] 曾磊, 陈明, 朱超, 等. 空间机械臂三维全物理地面试验方法研究[J]. 载人航天, 2021, 27(3): 359-366ZENG Lei, CHEN Ming, ZHU Chao, et al. Study on full-physical ground experiment test method for space manipulator 3D movement[J]. Manned Spaceflight, 2021, 27(3): 359-366 -
-

 下载:
下载:

图(10)
计量
- 文章访问数: 1405
- HTML全文浏览量: 627
- PDF下载量: 123
-
被引次数:
0(来源:Crossref)
0(来源:其他)

