


FlexRay总线的星载应用
doi: 10.11728/cjss2024.06.2023-0124 cstr: 32142.14.cjss.2023-0124
-
 胡继英朔 男, 2000年5月出生于山东省日照市, 现为中国科学院国家空间科学中心博士研究生, 专业为计算机应用技术, 主要研究方向为空间综合电子技术. E-mail: hujiyingshuo22@mails.ucas.ac.cn
胡继英朔 男, 2000年5月出生于山东省日照市, 现为中国科学院国家空间科学中心博士研究生, 专业为计算机应用技术, 主要研究方向为空间综合电子技术. E-mail: hujiyingshuo22@mails.ucas.ac.cn -
 朱岩 男, 1973年1月出生于江苏省连云港市, 现为中国科学院国家空间科学中心研究员, 博士生导师, 主要研究方向为空间综合电子技术, 空间数据智能处理、存储、传输技术等. E-mail: zhuyan@nssc.ac.cn
朱岩 男, 1973年1月出生于江苏省连云港市, 现为中国科学院国家空间科学中心研究员, 博士生导师, 主要研究方向为空间综合电子技术, 空间数据智能处理、存储、传输技术等. E-mail: zhuyan@nssc.ac.cn
作者简介:
通讯作者:
On-board Application of FlexRay Bus
-
摘要: 星载数据总线是卫星综合电子的重要组成部分. 随着空间探测任务的复杂化, 载荷对卫星综合电子数据传输的速率和实时性需求不断增加, 以1553B和CAN为代表的现有星载总线不能满足日益增长的星载数据传输需求, 需要开展地面应用成熟的高可靠高速FlexRay总线的星载应用研究. 分析FlexRay总线应用于卫星综合电子的技术优势, 开展FlexRay星载通信节点的软硬件设计; 考虑到FlexRay总线在轨应用时作为传统CAN总线的扩展或补充的应用场景, 采用轮转映射算法设计实现了CAN与FlexRay总线网关. 星载FlexRay总线系统经误码率测试, 连续地进行数据发送、接收, 组网中不同总线报文数据均交换正常, 未出现帧丢失或错误, 误码率低于10–8, 验证了其有效性与可靠性, 为后续以嫦娥、探火为代表的深空探测和空间科学探测卫星提供技术支撑.
-
关键词:
- FlexRay总线 /
- 星载FlexRay-CAN网关 /
- 高速总线通信 /
- 时间触发
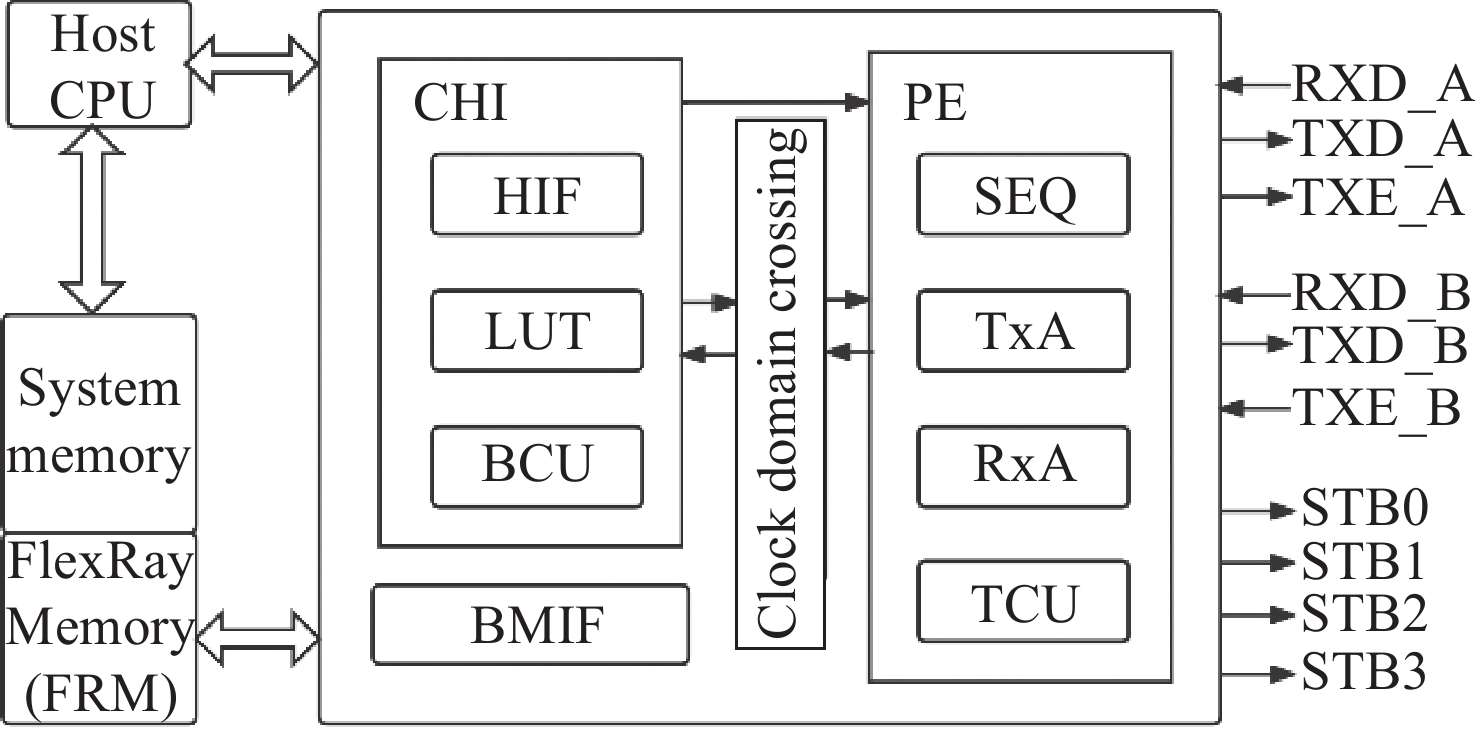
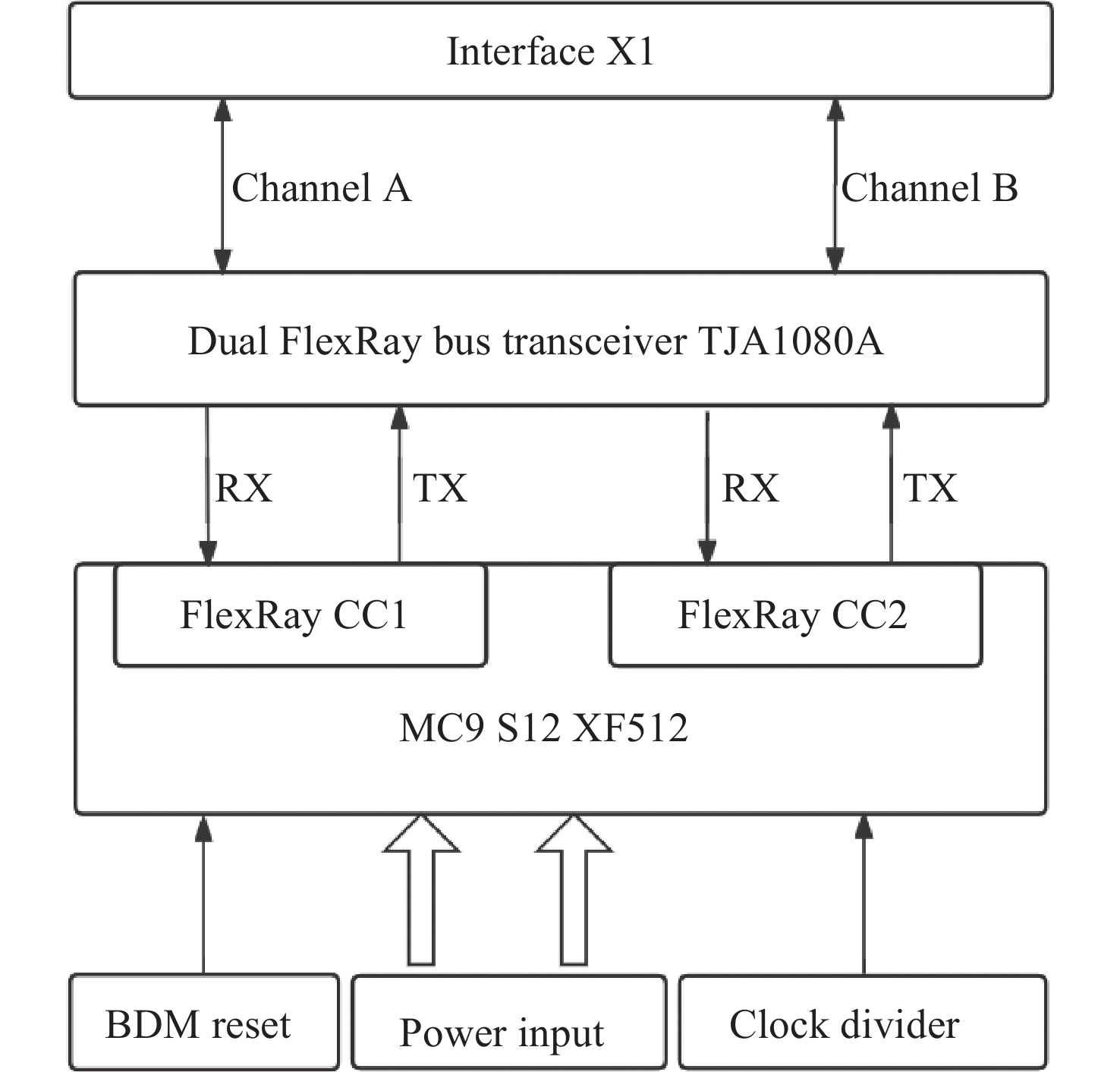
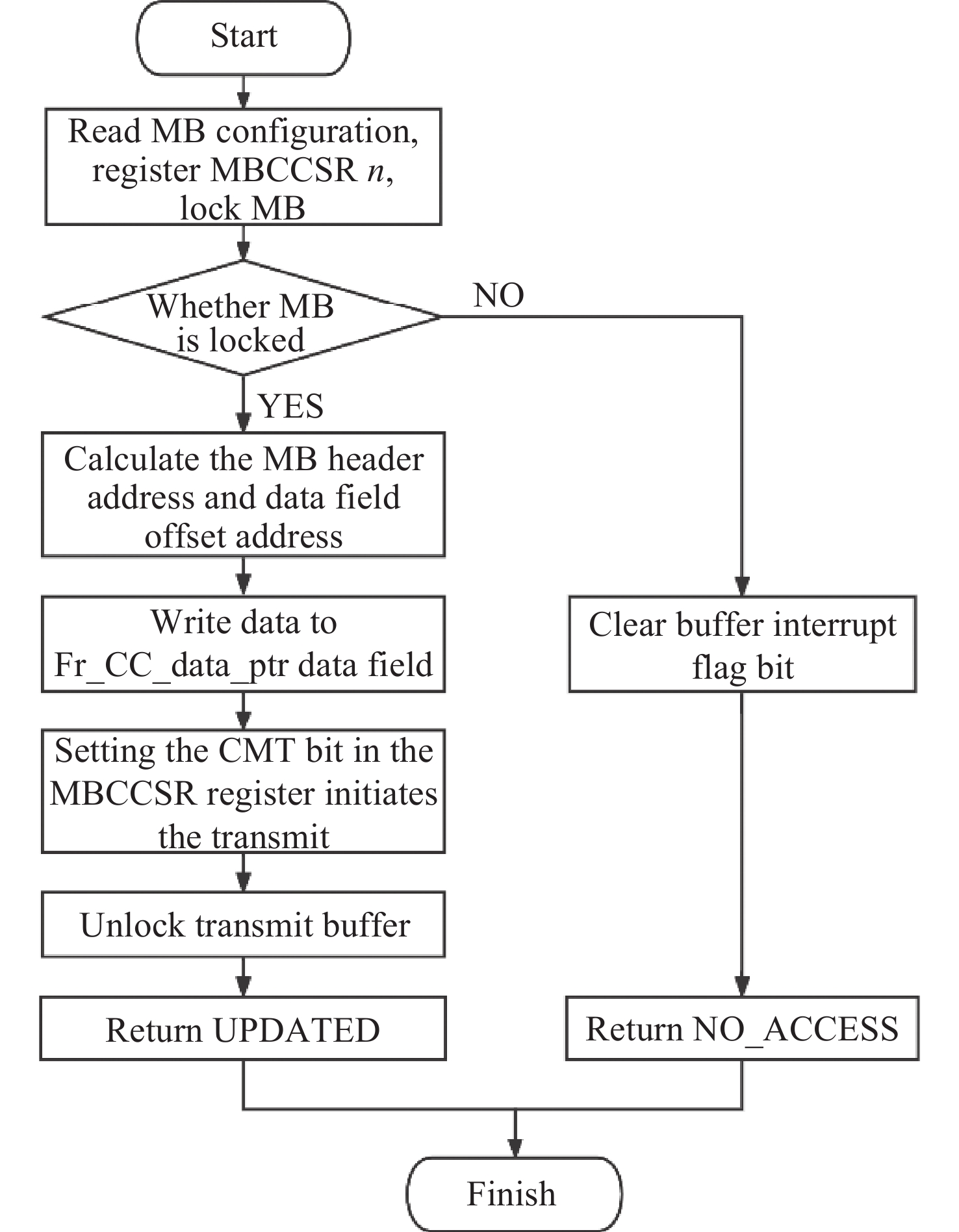
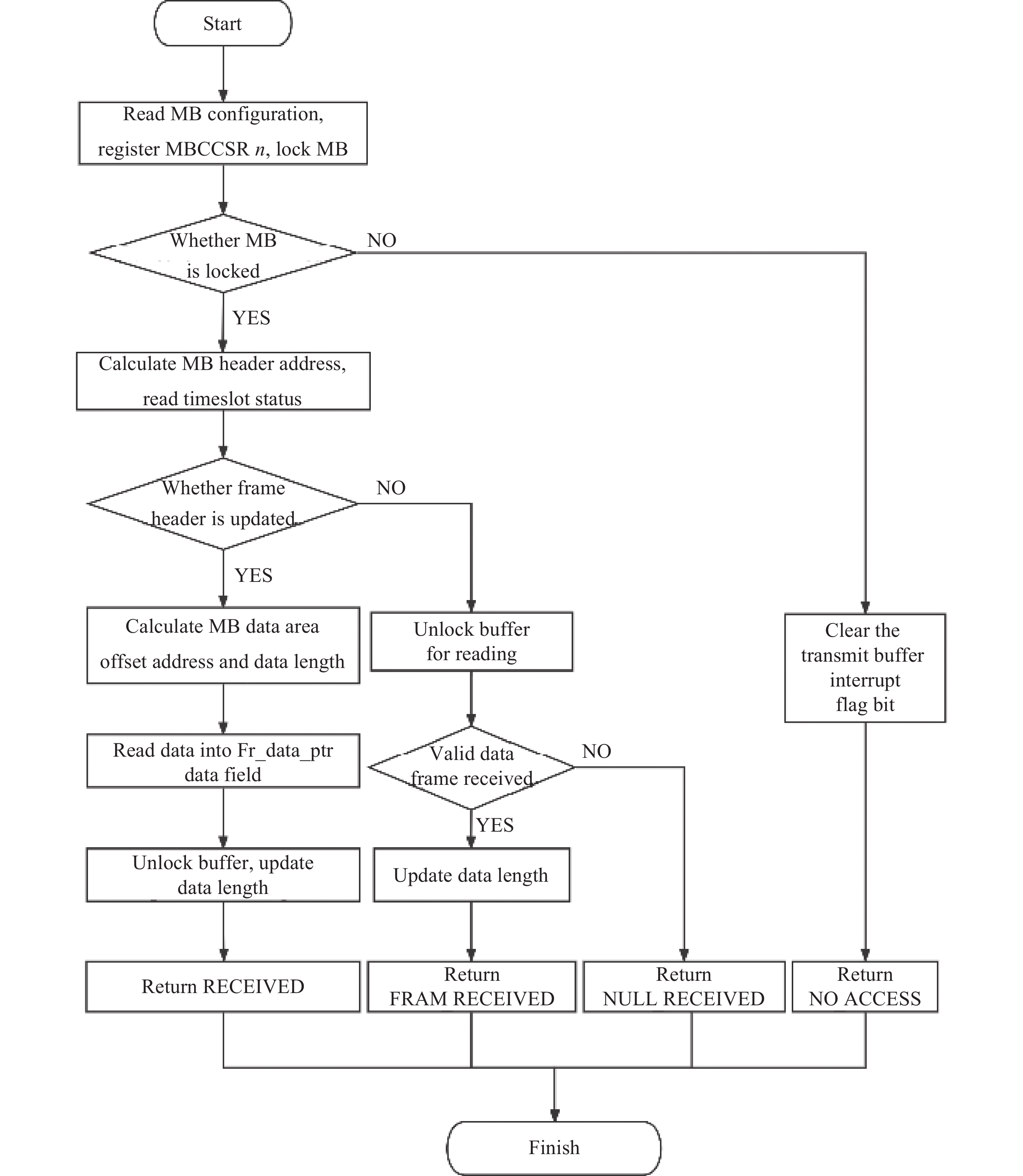
Abstract: With the increasing systematization and complexity of space exploration tasks, the transmission rate and real-time demand of scientific payloads for satellite integrated electronic data transmission are increasing. In response to the fact that the existing on-board buses represented by 1553B and CAN bus cannot meet the growing demand for on-board bus data transmission, this paper carries out the research on the satellite application of the ground-mature high-reliability and high-speed FlexRay bus. First of all, the technical advantages of FlexRay bus applied to satellite integrated electronics are analysed, and the hardware and software design of FlexRay on-board communication node is carried out. The static time is designed and applied to trigger the sending of the corresponding load data, and the dynamic segment of the highest priority event is applied to trigger the sending of regulatory commands, ensuring the system's real-time nature. Taking into account that FlexRay bus is used as an extension or supplement of traditional CAN bus in rail applications, the design realizes the gateway function of CAN bus and FlexRay bus, and adopts the turn-by-turn mapping algorithm to realize the sequential exchange of telegram messages between CAN bus and FlexRay bus. The system is verified by Code Warrior integrated environment, and the feasibility assessment is completed by building the hardware platform with MC9S12XF512. After the BER test, the data are sent and received continuously, and the data of different bus messages in the network are exchanged normally without frame loss or frame error, and the BER is lower than 10–8. The test results verify the validity and reliability of the design of the on-board FlexRay bus system, which will provide technological support for the subsequent deep-space exploration and space scientific exploration satellites represented by the Chang'E and the Fire Exploration Project. -
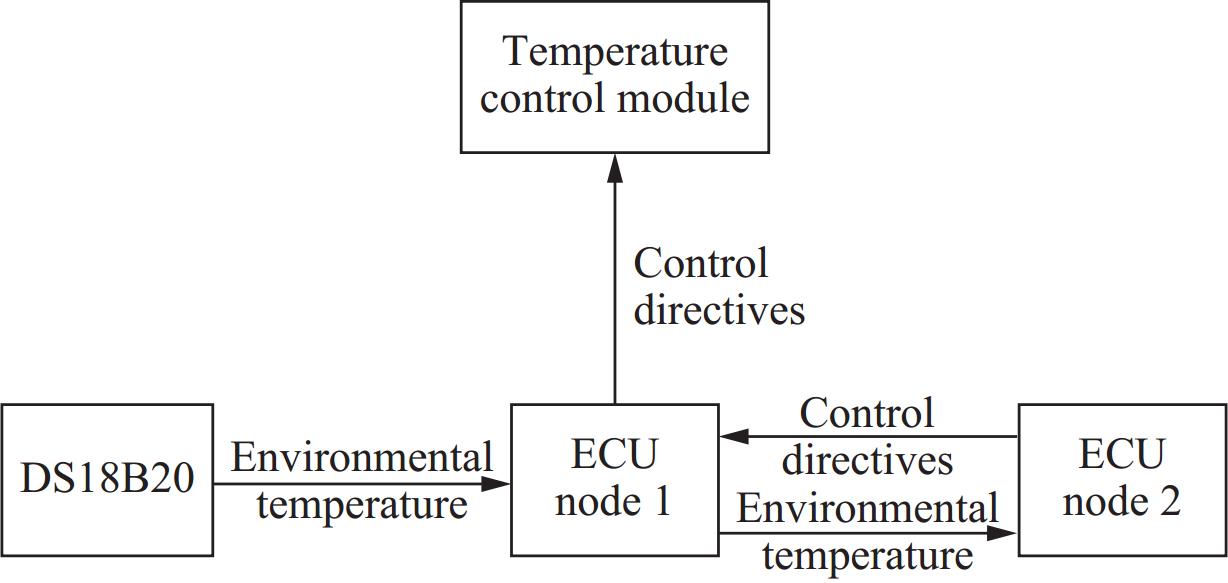
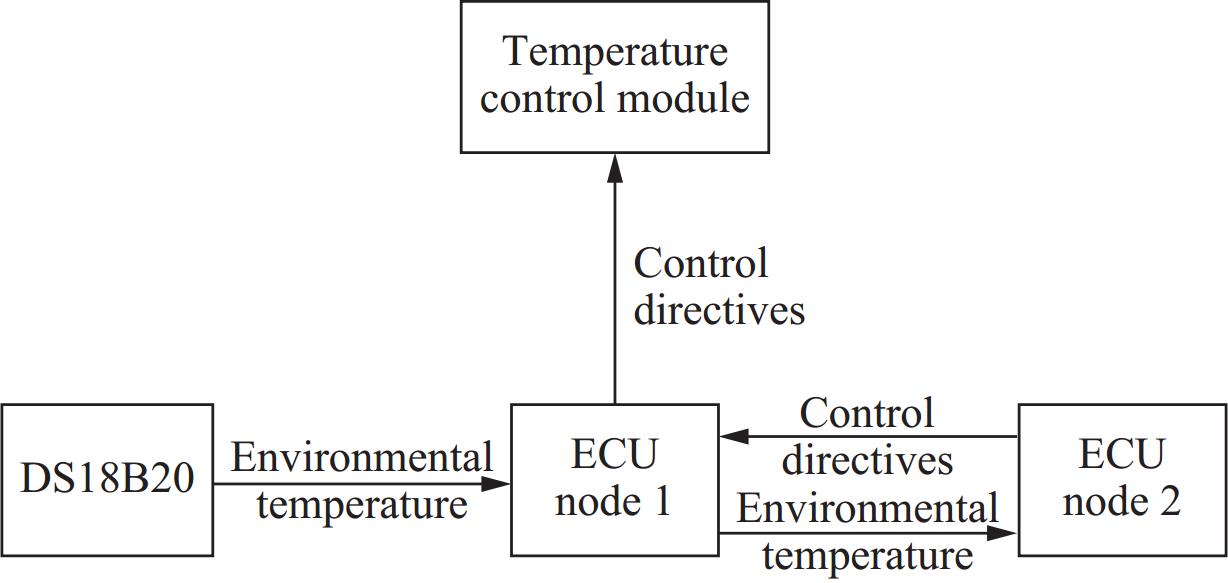
图 12 基于FlexRay的温度控制系统架构
Figure 12. FlexRay-based temperature control system architecture
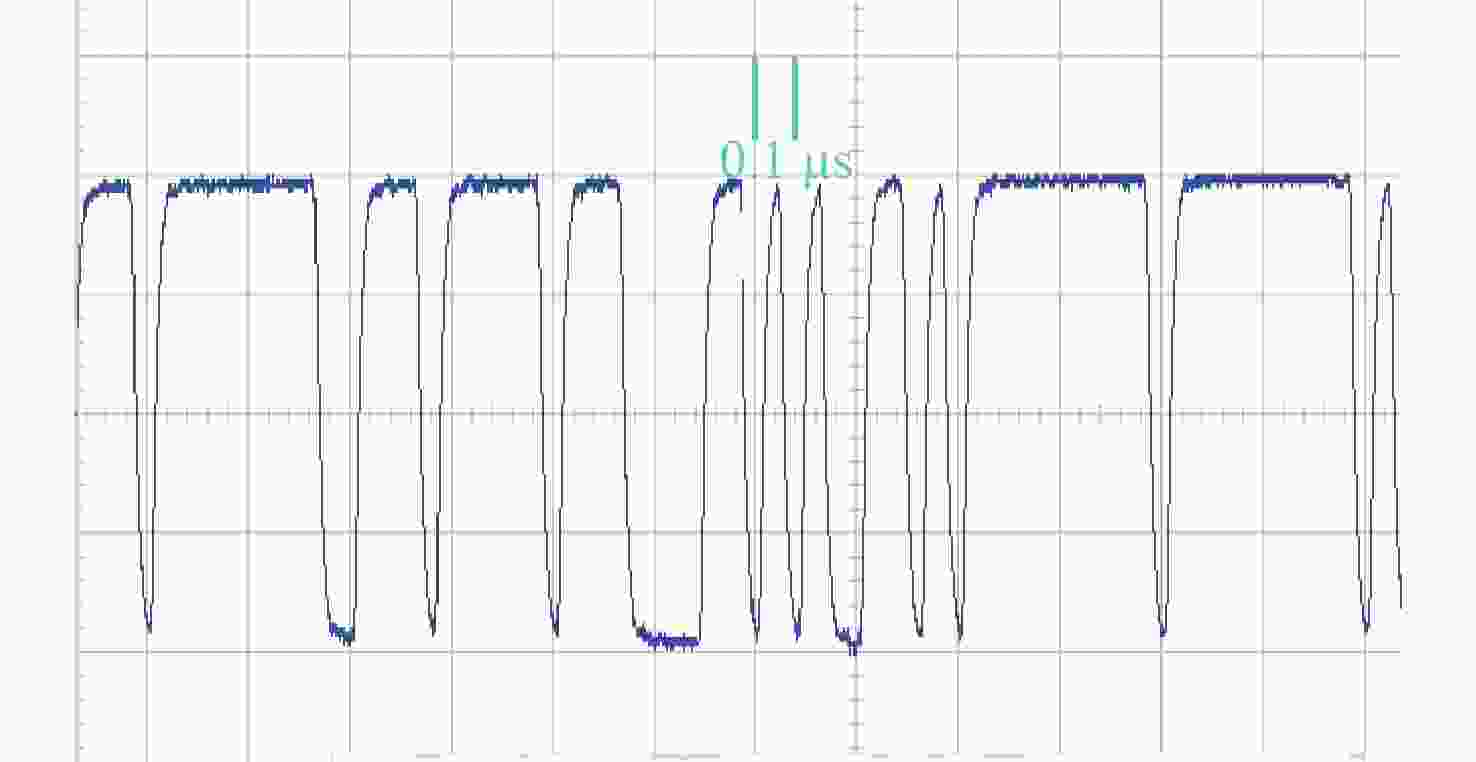
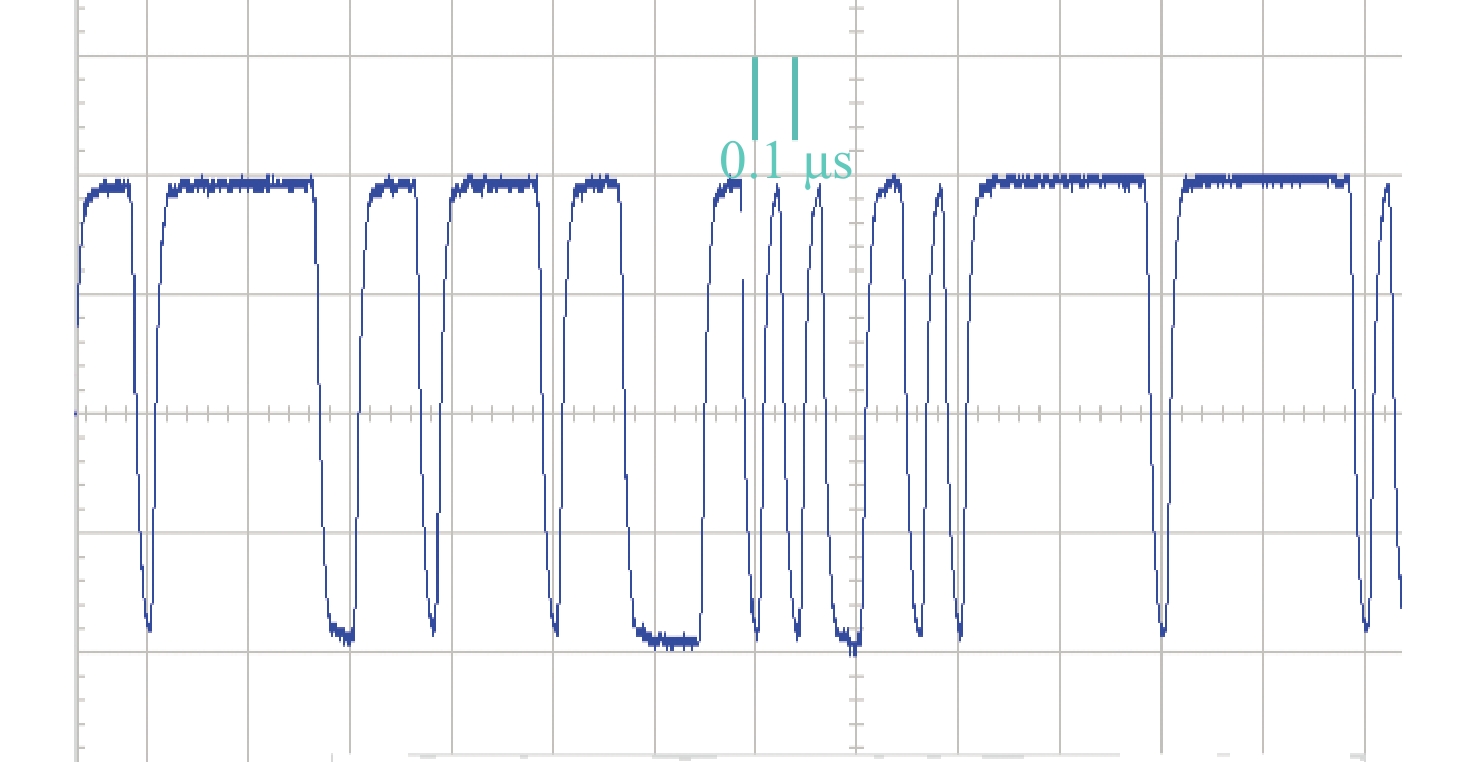
图 13 FlexRay总线传输速率10.0 Mbit⋅s–1
Figure 13. FlexRay bus transmission rate 10.0 Mbit⋅s–1
表 1 FlexRay总线与1553B及CAN总线机制对比
Table 1. Comparison of FlexRay bus with 1553B and CAN bus mechanisms
序号 类别 FlexRay CAN 1553B 1 速率 单通道即可达10 Mbit⋅s–1 0.125~1 Mbit⋅s–1 1 Mbit⋅s–1 2 拓扑结构 总线型、点对点型、星型 总线型 总线型 3 物理层 电缆/光纤 电缆 双绞线、电缆 4 通信方式 时间触发和事件触发 事件触发 事件触发 5 有效负载 最大254 Byte 最大8 Byte 最大32 Byte 6 故障计数 任何状态转换计数 固定的状态转换计数 固定的状态转换计数 7 访问方式 TDMA、FTDMA CSMA/CD CSMA/CD 8 CRC校验 帧头CRC、帧CRC 帧CRC 帧CRC 9 可确定性 好 较差 好  下载: 导出CSV
下载: 导出CSV
表 2 节点通信的全局变量部分参数设置值
Table 2. Global variable partial parameter setting values for node communication
序号 参数名称 设置数值 1 比特率 10 Mbit⋅s–1 2 同步节点最大数目 5 3 最大时间节拍长度 1 μs 4 周期长度 5000 MT 5 静态段 3000 MT 6 动态段 880 MT 7 符号窗 13 MT 8 偏移修正起始 4920 MT 9 静态段数目 60 10 静态时隙长度 50 MT 11 动作点偏移量 3 MT 12 静态段负载长度 32 Byte 13 最小时隙的最大数量 22 14 最小时隙长度 40 MT 15 最小时隙动作点偏移量 3 MT 16 动态段最大负载长度 16 Byte 17 FlexRay通道 A&B 18 全局位时间 0.1 μs 19 周期时长 5000 μs
下载: 导出CSV
表 3 CAN-FlexRay协议转换任务优先级
Table 3. CAN-FlexRay protocol conversion task prioritization
任务优先级 任务 0 FlexRay发送缓冲区重写 1 FlexRay报文发送任务 2 CAN报文发送任务 3 FlexRay报文接收处理任务 3 CAN报文接收处理任务
下载: 导出CSV
-
[1] 朱岩, 白云飞, 王连国, 等. 中国首次火星探测工程有效载荷总体设计[J]. 深空探测学报, 2017, 4(6): 510-514,534ZHU Yan, BAI Yunfei, WANG Lianguo, et al. Integral technical scheme of payloads system for Chinese Mars-1 exploration[J]. Journal of Deep Space Exploration, 2017, 4(6): 510-514,534 [2] WANG C, SONG T T, SHI P, et al. China’s space science program (2025–2030): strategic priority program on space science (Ⅲ)[J]. Chinese Journal of Space Science, 2022, 42(4): 514-518 doi: 10.11728/cjss2022.04.yg01 [3] 吴伟仁, 于登云. 深空探测发展与未来关键技术[J]. 深空探测学报, 2014, 1(1): 5-17WU Weiren, YU Dengyun. Development of deep space exploration and its future key technologies[J]. Journal of Deep Space Exploration, 2014, 1(1): 5-17 [4] 孙辉先, 李慧军, 张宝明, 等. 中国月球与深空探测有效载荷技术的成就与展望[J]. 深空探测学报, 2017, 4(6): 495-509SUN Huixian, LI Huijun, ZHANG Baoming, et al. Achievements and prospect of payloads technology in Chinese lunar and deep space exploration[J]. Journal of Deep Space Exploration, 2017, 4(6): 495-509 [5] 姚新涛, 谭争光, 丁毅, 等. FlexRay总线在AHEAD弹药炮控系统中的应用[J]. 兵器装备工程学报, 2021, 42(2): 152-155 doi: 10.11809/bqzbgcxb2021.02.029YAO Xintao, TAN Zhengguang, DING Yi, et al. Application of FlexRay bus in AHEAD ammunition gun control system[J]. Journal of Ordnance Equipment Engineering, 2021, 42(2): 152-155 doi: 10.11809/bqzbgcxb2021.02.029 [6] HE X W, WANG Q, ZHANG Z L. A survey of study of FlexRay systems for automotive net[C]//Proceedings of 2011 International Conference on Electronic & Mechanical Engineering and Information Technology. Harbin: IEEE, 2011: 1197-1204 [7] JAOUANI H, BOUHOUCH R, NAJJAR W, et al. Hybrid task and message scheduling in hard real time distributed systems over FlexRay bus[C]//2012 International Conference on Communications and Information Technology. Hammamet: IEEE, 2012: 21-26 [8] KUMAR N, MONDAL A. Timing analysis of precedence constraint messages scheduled with slot multiplexing over dynamic segment of FlexRay[J]. IEEE Transactions on Automation Science and Engineering, 2020, 17(1): 222-236 doi: 10.1109/TASE.2019.2907959 [9] LEE T Y, LIN I A, LIAO R H. Design of a FlexRay/Ethernet gateway and security mechanism for in-vehicle networks[J]. Sensors, 2020, 20(3): 641 doi: 10.3390/s20030641 [10] 张斌. 基于FlexRay协议的通信总线控制器的设计[D]. 西安: 西安电子科技大学, 2022ZHANG Bin. Design of Communication Bus Controller Based on FlexRay Protocol[D]. Xi’an: Xidian University, 2022 [11] 陈光, 顾金良, 刘庆国, 等. FlexRay总线在脉冲源控制系统设计中的应用[J]. 国外电子测量技术, 2019, 38(12): 135-139CHEN Guang, GU Jinliang, LIU Qingguo, et al. Application of FlexRay bus in pulse source control system design[J]. Foreign Electronic Measurement Technology, 2019, 38(12): 135-139 [12] 楚天. 基于FlexRay总线的微小卫星姿态控制数据传输系统[D]. 西安: 西安电子科技大学, 2014CHU Tian. Data Commission System of Microsatellite Position Control Based on FlexRay Bus[D]. Xi’an: Xidian University, 2014 [13] 张哲宇. CAN-FlexRay总线在车载系统中的组网研究与设计[D]. 贵阳: 贵州大学, 2018ZHANG Zheyu. Research and Design of CAN-Flexray Bus Networking in Vehicle System[D]. Guiyang: Guizhou University, 2018 -
-

 下载:
下载:


计量
- 文章访问数: 1235
- HTML全文浏览量: 592
- PDF下载量: 85
-
被引次数:
0(来源:Crossref)
0(来源:其他)

