


面向空间站货舱的果蔬精准检测方法
doi: 10.11728/cjss2026.03.2025-0080 cstr: 32142.14.cjss.2025-0080
-
 李文琴 女, 1998年出生, 上海电机学院硕士研究生, 主要从事深度学习、低成本货运飞船智能检测系统的研究. E-mail: 15858329317@163.com
李文琴 女, 1998年出生, 上海电机学院硕士研究生, 主要从事深度学习、低成本货运飞船智能检测系统的研究. E-mail: 15858329317@163.com -
 常亮 男, 1980年出生, 中国科学院微小卫星创新研究院研究员、博士生导师, 主要研究方向为人工智能、微纳卫星系统等领域. 现任中国科学院微小卫星创新研究院轻舟货运飞船总设计师, 曾参与北斗导航卫星系统建设, 并担任“悟空”号暗物质探测卫星总体主任设计师. E-mail: 13774362558@163.com
常亮 男, 1980年出生, 中国科学院微小卫星创新研究院研究员、博士生导师, 主要研究方向为人工智能、微纳卫星系统等领域. 现任中国科学院微小卫星创新研究院轻舟货运飞船总设计师, 曾参与北斗导航卫星系统建设, 并担任“悟空”号暗物质探测卫星总体主任设计师. E-mail: 13774362558@163.com
作者简介:
通讯作者:
An Accurate Detection Method for Fruits and Vegetables in the Space Station Cargo Bay
-
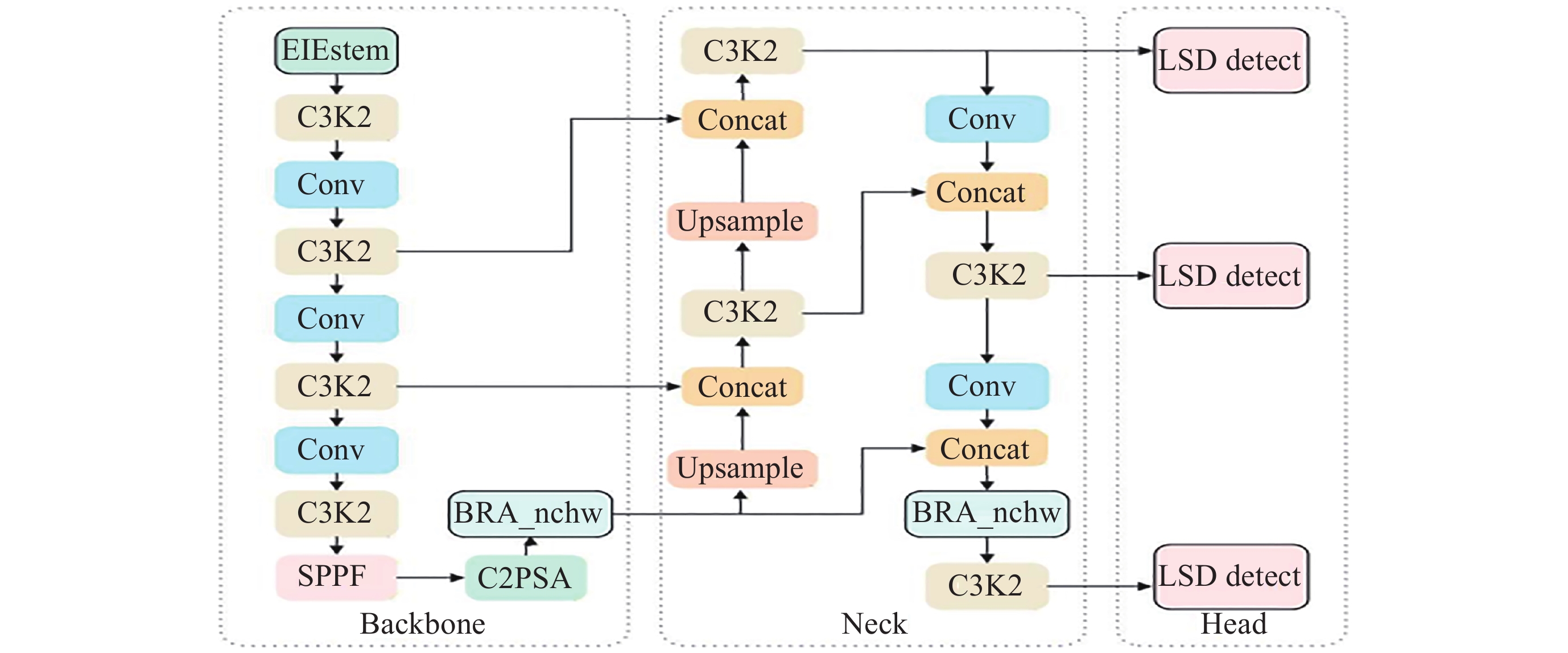
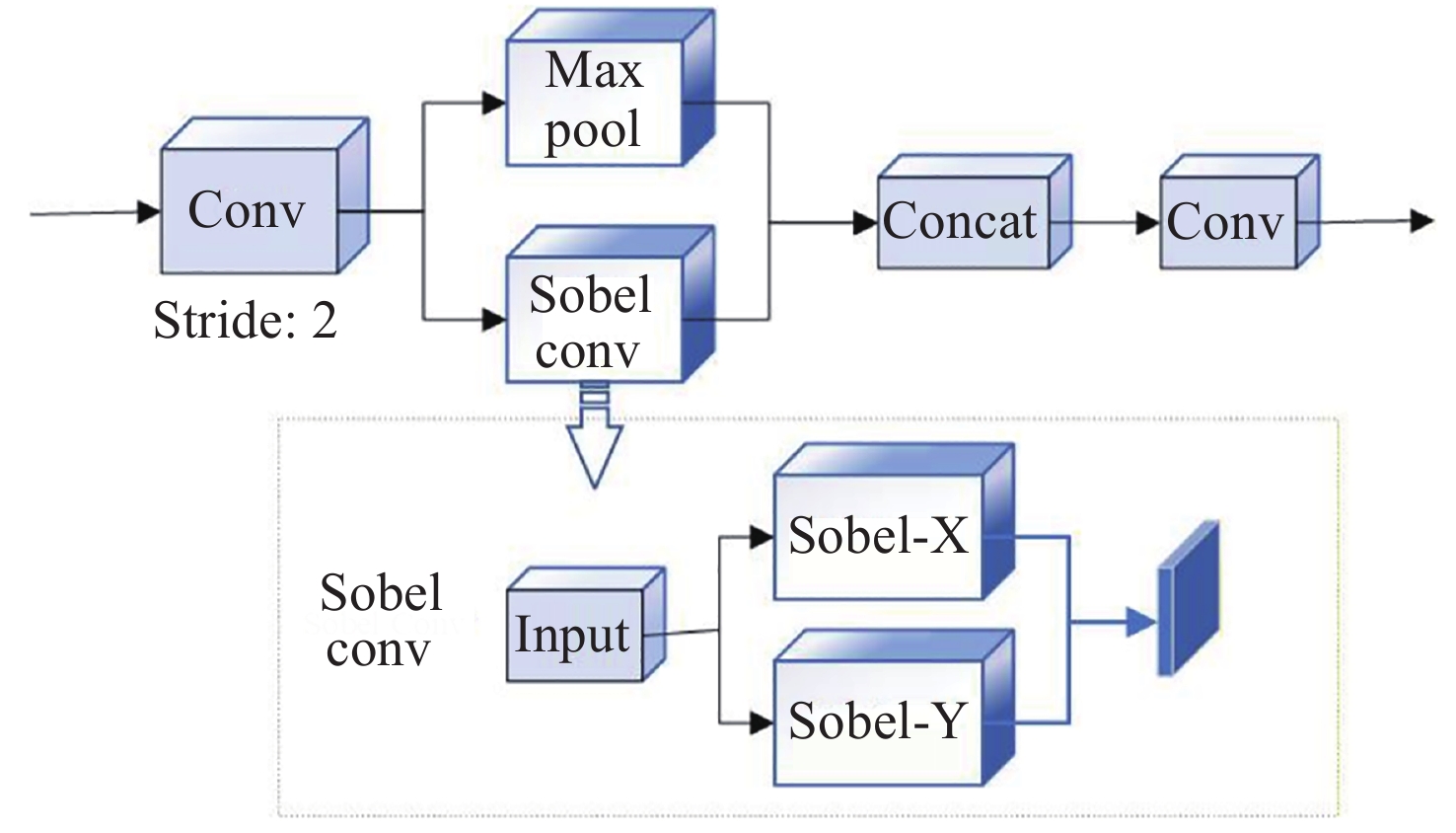
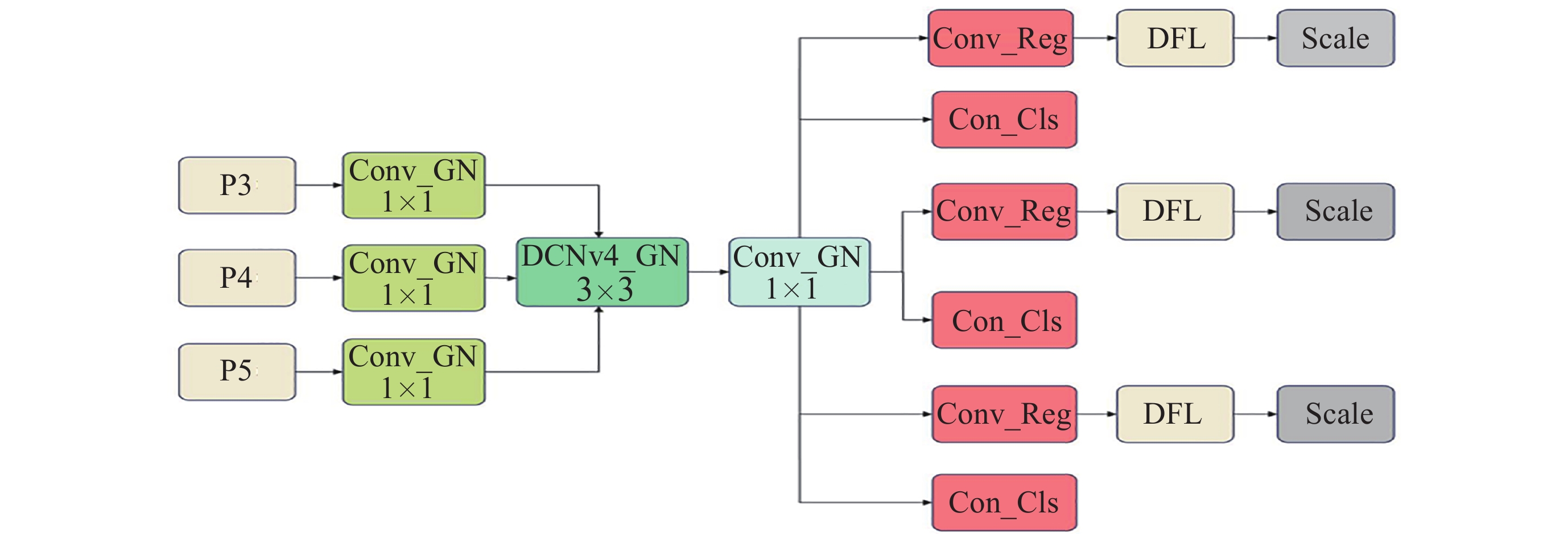
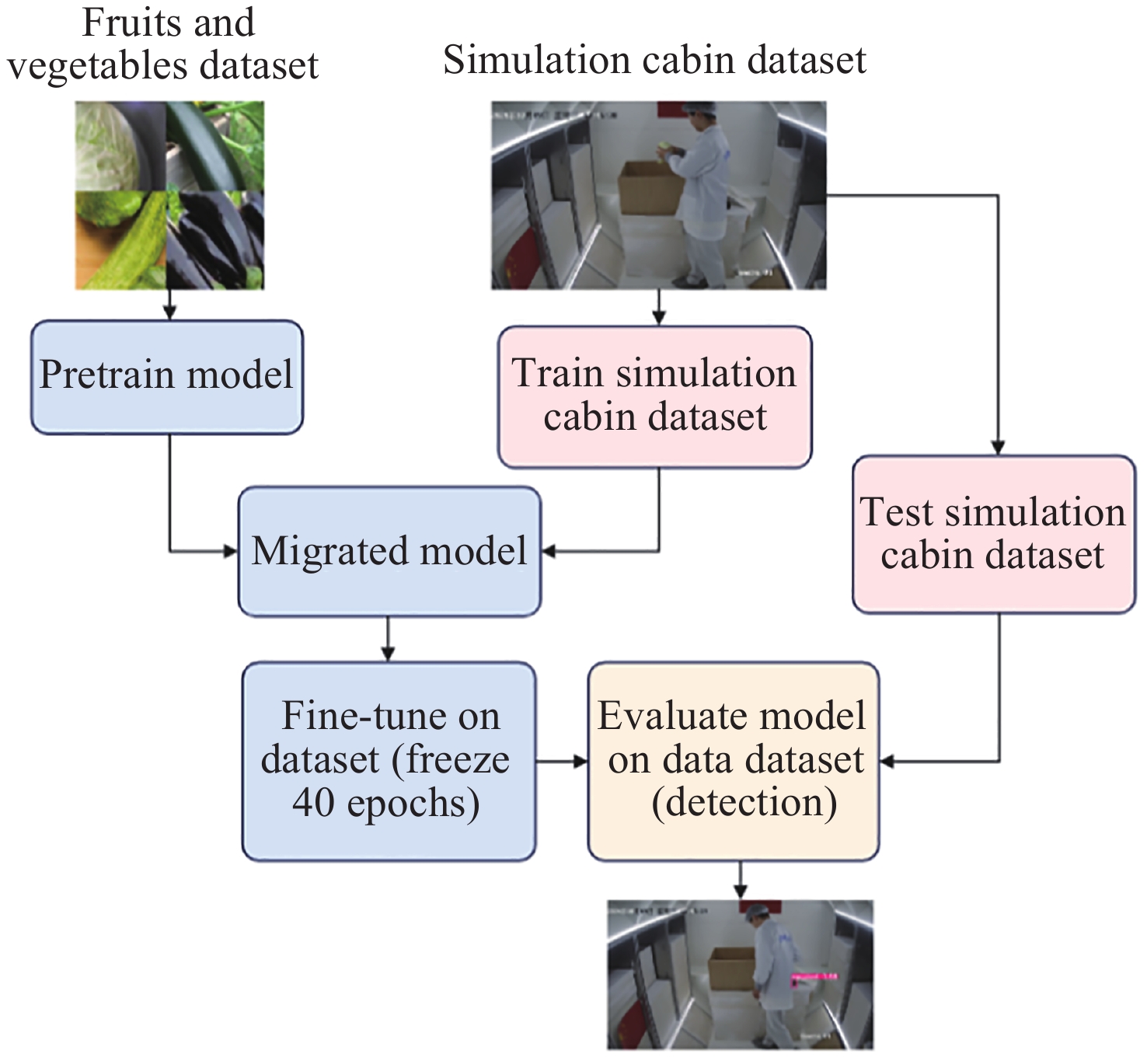
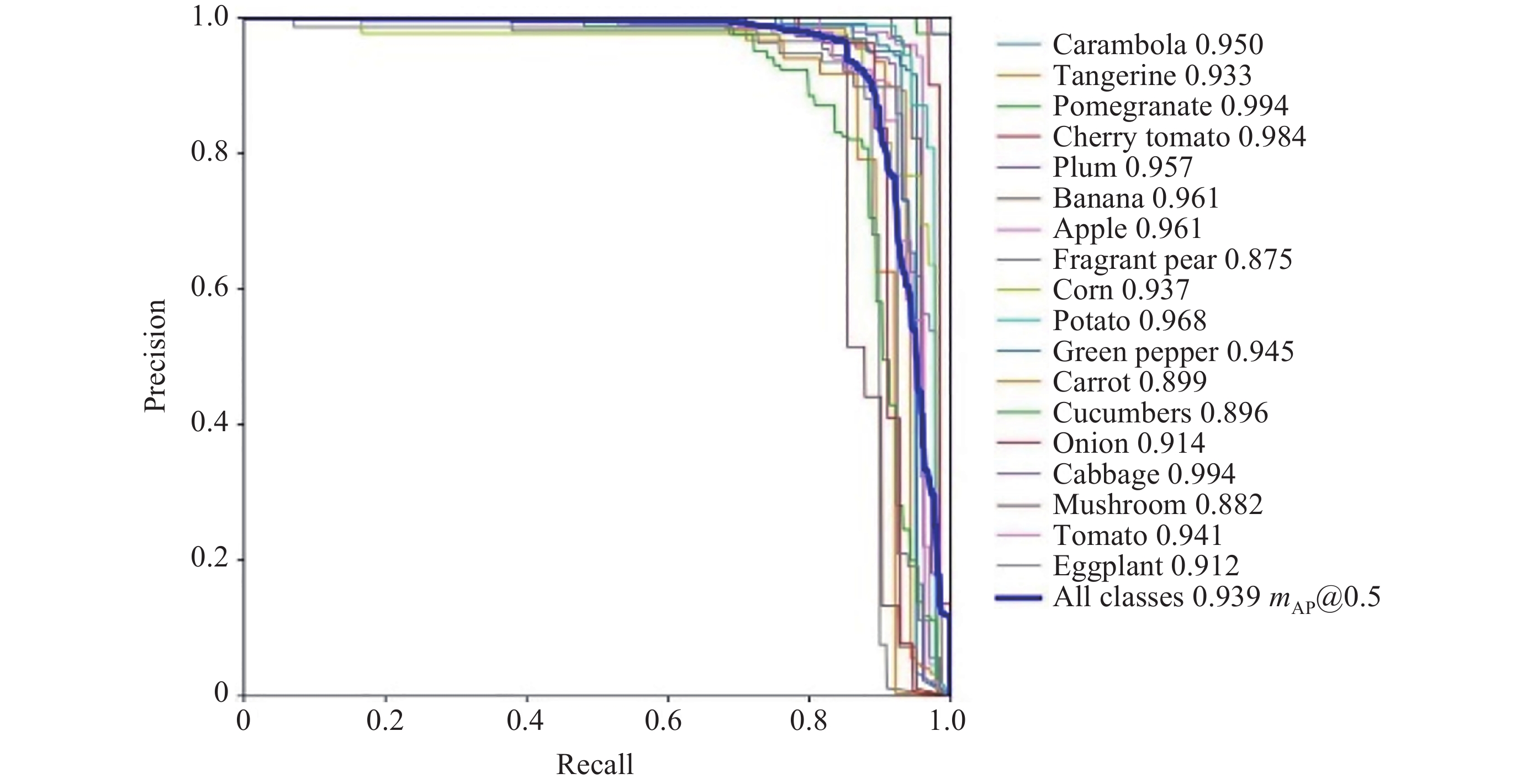
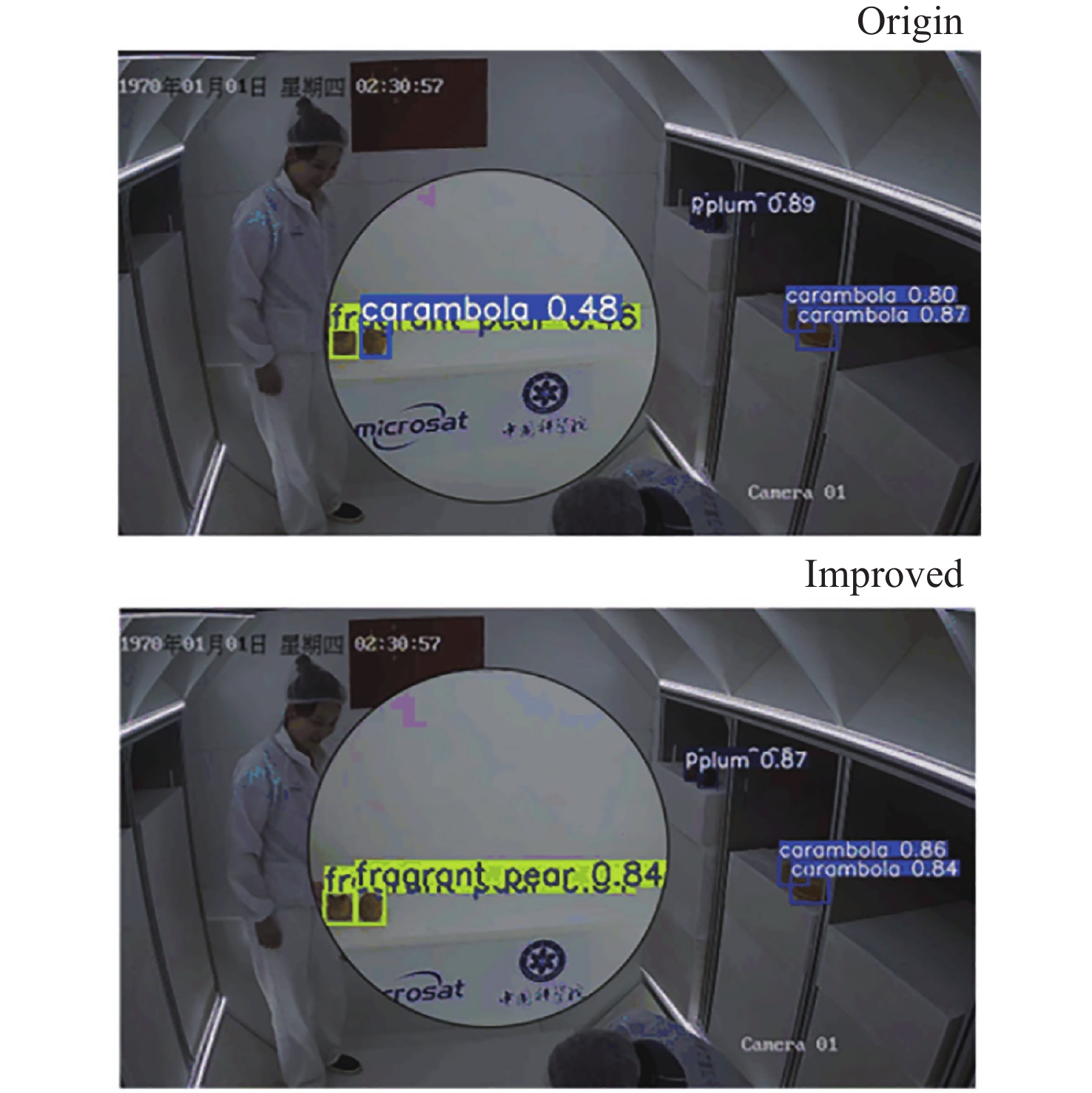
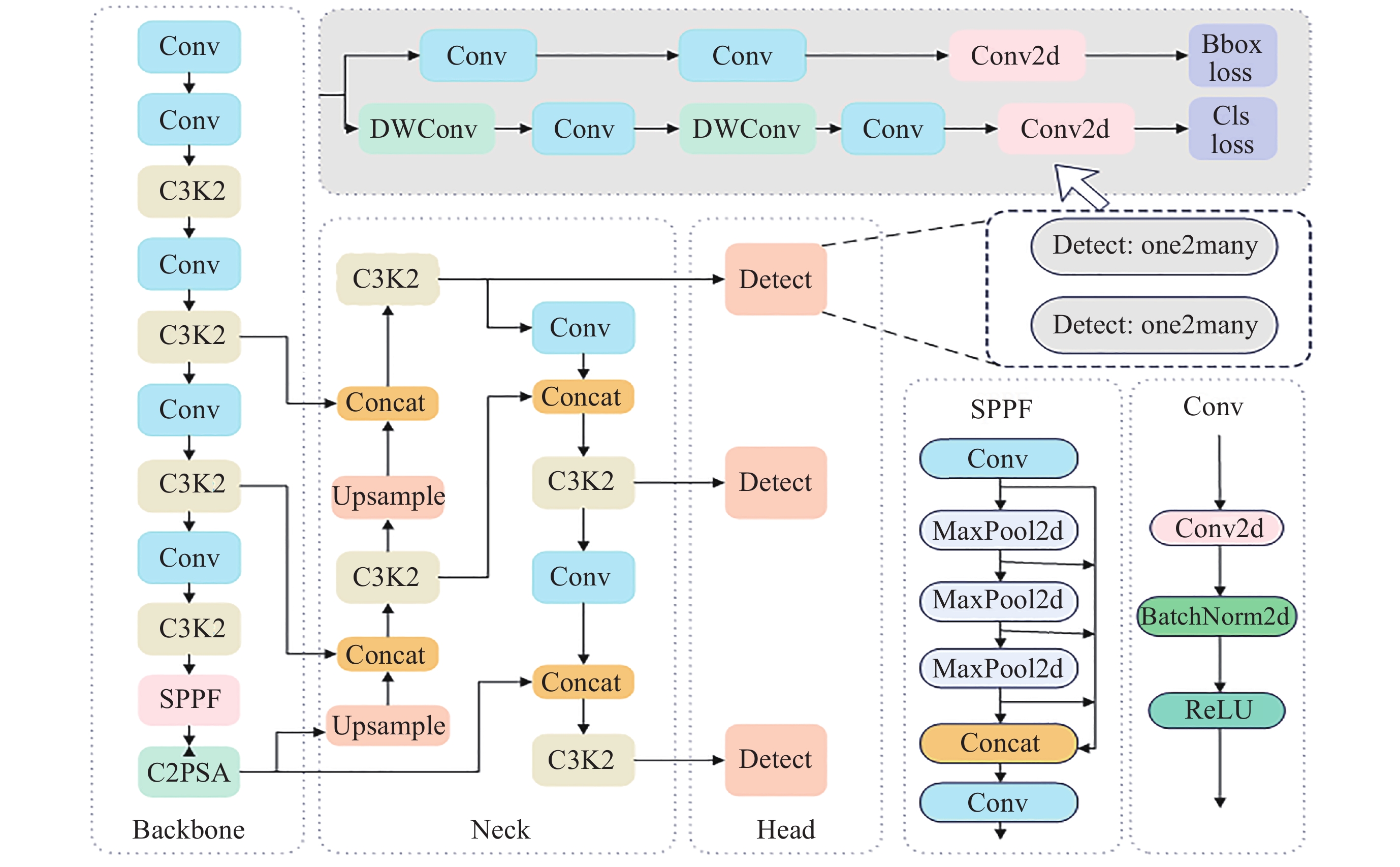
摘要: 机器视觉技术在空间站货舱管理的实际应用方面处于初步阶段, 为了解决空间站货舱的狭小空间、遮挡和光照等问题导致的检测精度不足, 提出一种基于YOLO11的空间站货舱果蔬检测改进算法——LEBR-YOLO. 该方法把卷积改进为结合空间信息和边缘信息的高效输入特征提取干层, 同时添加双层注意力机制, 提高了提取特征的能力. 引入改进的轻量级共享可变形检测模块, 提高了遮挡情况下的检测能力. 使用迁移学习作为优化模型的方法, 弥补数据集的不足, 提高泛化能力. 实验表明, 该方法在自制果蔬类数据集上达到95.3%的准确率、88.6%召回率和93.9% mAP@0.5, 同时依然保持较低的模型复杂度, 满足轻舟货运飞船在轨运行的需要. 该方法可有效应用于空间站水果、蔬菜类物品检测, 提高了检测精度, 有效减少了误检和漏检.Abstract: Machine vision technology remains in its nascent stage for practical application in space station cargo bay management, with limited research currently addressing target detection in space station environments. To overcome detection accuracy limitations caused by confined spaces, obstructions, and lighting conditions in cargo bays, this study proposes an enhanced YOLOv11-based algorithm for fruit and vegetable detection: LEBR-YOLO. Drawing on successful implementations of existing visual detection techniques, this approach refines the original convolutional neural network architecture by integrating spatial and edge information via a dual-layer attention mechanism, thereby enhancing processing efficiency for high-resolution feature maps. Specifically, it improves feature extraction capabilities by modifying the original convolutional module into an efficient input feature extraction layer that fuses spatial and edge information. Concurrently, a dual-layer attention mechanism is incorporated to significantly boost the model’s processing efficiency for high-resolution feature maps. An enhanced lightweight shared deformable detection module is introduced, which adopts a shared convolutional architecture combined with deformable convolutions; a dynamic adjustment mechanism integrating category loss and bounding box loss is also employed to improve detection performance under occlusion. Transfer learning is used as an optimization technique to compensate for dataset limitations, reducing computational costs while enhancing model generalization. Experiments demonstrate that this model significantly improves object detection under occlusion: on a custom fruit and vegetable dataset, it achieves 95.3% accuracy, 88.6% recall, and 93.9% mAP@0.5, while maintaining low model complexity. This meets the detection requirements for the Tianzhou cargo spacecraft during in-orbit operations. This approach proves highly effective for detecting fruits and vegetables in space stations, enhancing detection accuracy, substantially reducing false positives and false negatives, and elevating the automation level of on-board resource management.
-
表 1 实验环境配置
Table 1. Configuration of experimental environment
Experimental environment Configuration Operating system ubuntu22.04 Graphics Processing Unit (GPU) RTX 3090 (24 GB) Central Processing Unit (CPU) Intel (R) Xeon (R) Gold 6330 Deep learning framework PyTorch2.1 Computing platform Cuda12.1 Random Access Memory (RAM) 60 GB Interpreter Python3.10  下载: 导出CSV
下载: 导出CSV
表 2 遮挡对比试验
Table 2. Occultation comparison experiment
遮挡等级 YOLO11 LEBR-YOLO mAP@0.5提升
幅度/(%)mAP@0.5/(%) mAP@0.5:0.95/(%) mAP@0.5/(%) mAP@(0.5~0.95)/(%) 无遮挡 95.2 66.7 96.5 68.4 1.3 轻度遮挡 92.8 62.9 94.1 64.8 1.3 中度遮挡 89.8 58.9 91.8 61.0 2.0 严重遮挡 85.9 54.0 88.2 56.3 2.3
下载: 导出CSV
表 3 消融实验
Table 3. Ablation experiment
YOLO11 n EIEstem LSDDetect BRA_nchw P/(%) R/(%) mAP@0.5/(%) mAP@(0.5~0.95)/(%) √ - - - 91.2 85.6 91.2 61.1 √ √ - - 92.8 88.1 93.2 61.5 √ - √ - 93.1 87.2 92.4 60.8 √ - - √ 93.2 88.4 93.2 62.2 √ √ √ - 93.7 86.5 92.0 60.2 √ √ - √ 93.3 88.0 93.1 61.2 √ - √ √ 93.5 87.9 92.5 62.1 √ √ √ √ 94.3 88.5 93.3 62.3
下载: 导出CSV
表 4 注意力机制比较
Table 4. Comparison of attention mechanisms
Models P/(%) R/(%) mAP@0.5/(%) mAP@(0.5~0.95)/(%) CPCA 90.9 86.1 92.3 61.2 SimAm 92.3 85.9 91.9 61.2 Dattention 92.8 86.8 91.5 61.6 Local Window Attention 92.3 85.8 91.4 61.3 BRA_nchw 93.2 88.4 93.2 62.2
下载: 导出CSV
表 5 迁移学习对模型性能的影响
Table 5. Impact of transfer learning on model performance
Models P/(%) R/(%) mAP@0.5/(%) mAP@(0.5~0.95)/(%) A 91.2 85.6 91.2 61.1 B 93.9 87.4 92.7 62.0 C 94.3 88.5 93.3 62.3 D 95.3 88.6 93.9 63.4
下载: 导出CSV
表 6 模型对比
Table 6. Comparison of the models
Model P/(%) R/(%) mAP@0.5/(%) mAP@(0.5~0.95)/(%) Parameters
(×106)GFLOPs FPS YOLOv5 91.0 86.6 90.8 60.7 2.2 5.8 242.31 YOLOv8 91.2 85.5 91.0 60.0 3.0 8.1 153.81 YOLOv10 n 90.9 83.7 90.2 60.9 2.3 6.5 379.53 FasterRCNN 87.8 78.0 83.1 55.6 41.0 198 13.65 YOLO11 n 91.2 85.6 91.2 61.1 2.6 6.3 288.50 LEBR-YOLO 95.3 88.6 93.9 63.4 3.1 7.1 270.24
下载: 导出CSV
-
[1] 王巍, 郭佩, 尹钊. 空间站航天技术试验发展与展望[J]. 空间科学与试验学报, 2024, 1(1): 1-12WANG Wei, GUO Pei, YIN Zhao. Development and outlook for space technology experiments on space stations[J]. Journal of Space Science and Experiment, 2024, 1(1): 1-12 [2] 山显英, 张琳, 李泽慧. 深度学习驱动下的目标检测研究进展综述[J]. 计算机工程与应用, 2025, 61(1): 24-41SHAN Xianying, ZHANG Lin, LI Zehui. Review of research progress in object detection driven by deep learning[J]. Computer Engineering and Applications, 2025, 61(1): 24-41 [3] PANT P, RAJAWAT A S, GOYAL S B, et al. AI based technologies for international space station and space data[C]//2022 11th International Conference on System Modeling & Advancement in Research Trends (SMART). Moradabad, India: IEEE, 2022: 19-25 [4] MING L, HONG L X, WEI W. Design and application of aerospace intelligent housing system of manned space station base on space-integrated-ground network[C]//2024 7th World Conference on Computing and Communication Technologies (WCCCT). Chengdu, China: IEEE, 2024: 255-259 [5] REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas, USA: IEEE, 2016: 779-788 [6] GAI R L, LIU Y, XU G H. TL-YOLOv8: a blueberry fruit detection algorithm based on improved YOLOv8 and transfer learning[J]. IEEE Access, 2024, 12: 86378-86390 doi: 10.1109/ACCESS.2024.3416332 [7] 姜业帆, 江朝晖, 朱瑞, 等. 基于PCIA-YOLO的复杂环境下草莓成熟度轻量化检测方法[J/OL]. 南京农业大学学报, 2024: 1-15. (2024-10-08)[2025-01-08]. https://link.cnki.net/urlid/32.1148.S.20240930.1738.008JIANG Yefan, JIANG Zhaohui, ZHU Rui, et al. Strawberry ripeness in a complex environment based on PCIA-YOLO Lightweight detection method[J/OL]. Journal of Nanjing Agricultural University, 2024: 1-15. (2024-10-08)[2025-01-08]. https://link.cnki.net/urlid/32.1148.S.20240930.1738.008 [8] LIU Z G, GAO Y, DU Q Q. YOLO-Class: detection and classification of aircraft targets in satellite remote sensing images based on YOLO-extract[J]. IEEE Access, 2023, 11: 109179-109188 doi: 10.1109/ACCESS.2023.3321828 [9] LIU X J, WANG Y P, YU D X, et al. YOLOv8-FDD: a real-time vehicle detection method based on improved YOLOv8[J]. IEEE Access, 2024, 12: 136280-136296 doi: 10.1109/ACCESS.2024.3453298 [10] SUI T T, WANG J W. DMPDD-Net: an effective defect detection method for aluminum profiles surface defect[J]. IEEE Transactions on Instrumentation and Measurement, 2025, 74: 3500313 doi: 10.1109/tim.2024.3497168 [11] 郑华伟, 王飞, 高建邦. DES-YOLO: 一种更精确的目标检测方法[J]. 光电工程, 2024, 51(11): 240212ZHENG Huawei, WANG Fei, GAO Jianbang. ES-YOLO: a more accurate object detection method[J]. Opto-Electronic Engineering, 2024, 51(11): 240212 [12] 邵延华, 张铎, 楚红雨, 等. 基于深度学习的YOLO目标检测综述[J]. 电子与信息学报, 2022, 44(10): 3697-3708 doi: 10.11999/JEIT210790SHAO Yanhua, ZHANG Duo, CHU Hongyu, et al. A review of YOLO object detection based on deep learning[J]. Journal of Electronics & Information Technology, 2022, 44(10): 3697-3708 doi: 10.11999/JEIT210790 [13] HAO J B. Deep learning-based medical image analysis with explainable transfer learning[C]//2023 International Conference on Computer Engineering and Distance Learning (CEDL). Shanghai, China: IEEE, 2023: 106-109 [14] HUANG B N, CHEN X, SUN Y P, et al. Multi-agent cooperative strategy learning method based on transfer learning[C]//2022 13th Asian Control Conference (ASCC). Jeju, Republic of Korea: IEEE, 2022: 1095-1100 [15] YAN J H, WANG X F, ALI A. Deep transfer learning based multi-source heterogeneous data fusion with application to cross-scenario tool wear monitoring[C]//2021 7th International Conference on Mechanical Engineering and Automation Science (ICMEAS). Seoul, Republic of Korea: IEEE, 2021: 96-101 [16] WANG A, CHEN H, LIU L H, et al. YOLOv10: real-time end-to-end object detection[EB/OL]. (2024-05-23)[2024-10-30]. https://arxiv.org/abs/2405.14458 [17] SAPKOTA R, MENG Z C, CHURUVIJA M, et al. Comprehensive performance evaluation of YOLOv12, YOLO11, YOLOv10, YOLOv9 and YOLOv8 on detecting and counting fruitlet in complex orchard environments[EB/OL]. (2024-07-01)[2024-10-17]. https://arxiv.org/abs/2407.12040 [18] WU T, WANG L W, ZHU J C. Image edge detection based on Sobel with morphology[C]//2021 IEEE 5th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC). Xi’an, China: IEEE, 2021: 1216-1220 [19] ZHU L, WANG X J, KE Z H, et al. BiFormer: vision transformer with bi-level routing attention[C]//2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Vancouver, Canada: IEEE, 2023: 10323-10333 [20] 肖磊, 胡鹏, 马俊杰. 局部注意力作用下基于全局信息关联的自监督单目深度估计模型[J]. 激光与光电子学进展, 2025, 62(8): 0815010 doi: 10.3788/LOP241870XIAO Lei, HU Peng, MA Junjie. Self-supervised monocular depth estimation model based on global information correlation under influence of local attention[J]. Laser & Optoelectronics Progress, 2025, 62(8): 0815010 doi: 10.3788/LOP241870 [21] KHAN G, PIMBBLET K, WERTHEIM K, et al. A single shot multi-head gender, age, and landmarks detection using shared convolution features[C]//2024 29th International Conference on Automation and Computing (ICAC). Sunderland, United Kingdom: IEEE, 2024: 1-6 [22] WU Y X, HE K M. Group normalization[C]//Proceedings of 15th European Conference on Computer Vision – ECCV 2018. Munich: Springer, 2018: 3-19 [23] XIONG Y W, LI Z Q, CHEN Y T, et al. Efficient deformable ConvNets: rethinking dynamic and sparse operator for vision applications[C]//2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2024: 5652-5661 [24] 李鑫尧, 李晶晶, 朱磊, 等. 资源受限的大模型高效迁移学习算法研究综述[J]. 计算机学报, 2024, 47(11): 2491-2521LI Xinyao, LI Jingjing, ZHU Lei, et al. Efficient transfer learning of large models with limited resources: a survey[J]. Chinese Journal of Computers, 2024, 47(11): 2491-2521 [25] ZHU Z D, LIN K X, JAIN A K, et al. Transfer learning in deep reinforcement learning: a survey[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(11): 13344-13362 doi: 10.1109/TPAMI.2023.3292075 [26] 胡海宁, 黄雷阳, 杨洪刚, 等. 改进YOLOv8n的轻量型蜂窝陶瓷缺陷检测算法[J]. 激光与光电子学进展, 2024, 61(22): 2212006 doi: 10.3788/LOP240670HU Haining, HUANG Leiyang, YANG Honggang, et al. Improved YOLOv8n lightweight honeycomb ceramic defect-detection algorithm[J]. Laser & Optoelectronics Progress, 2024, 61(22): 2212006 doi: 10.3788/LOP240670 -
-

 下载:
下载:


计量
- 文章访问数: 926
- HTML全文浏览量: 391
- PDF下载量: 89
-
被引次数:
0(来源:Crossref)
0(来源:其他)

