QIU Xin’an,
MA Dongtao,
TIAN Licheng,
HU Yuqian,
WU Zhihong,
ZENG Zhenglin,
WEI Zhiming,
DUAN Fuwei,
XIAO Qiang,
MA Hongjiong,
SHI Wei
Abstract:
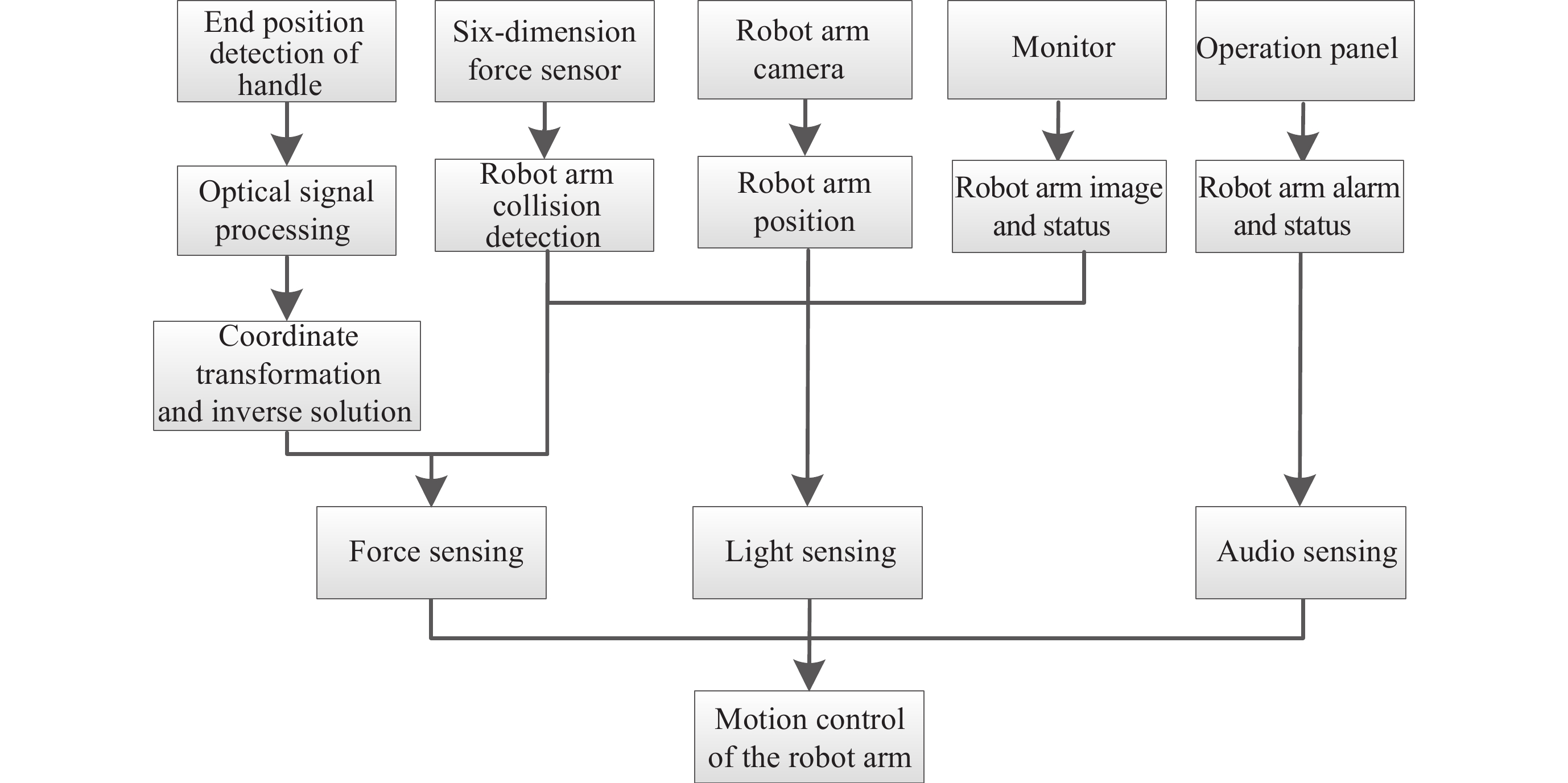
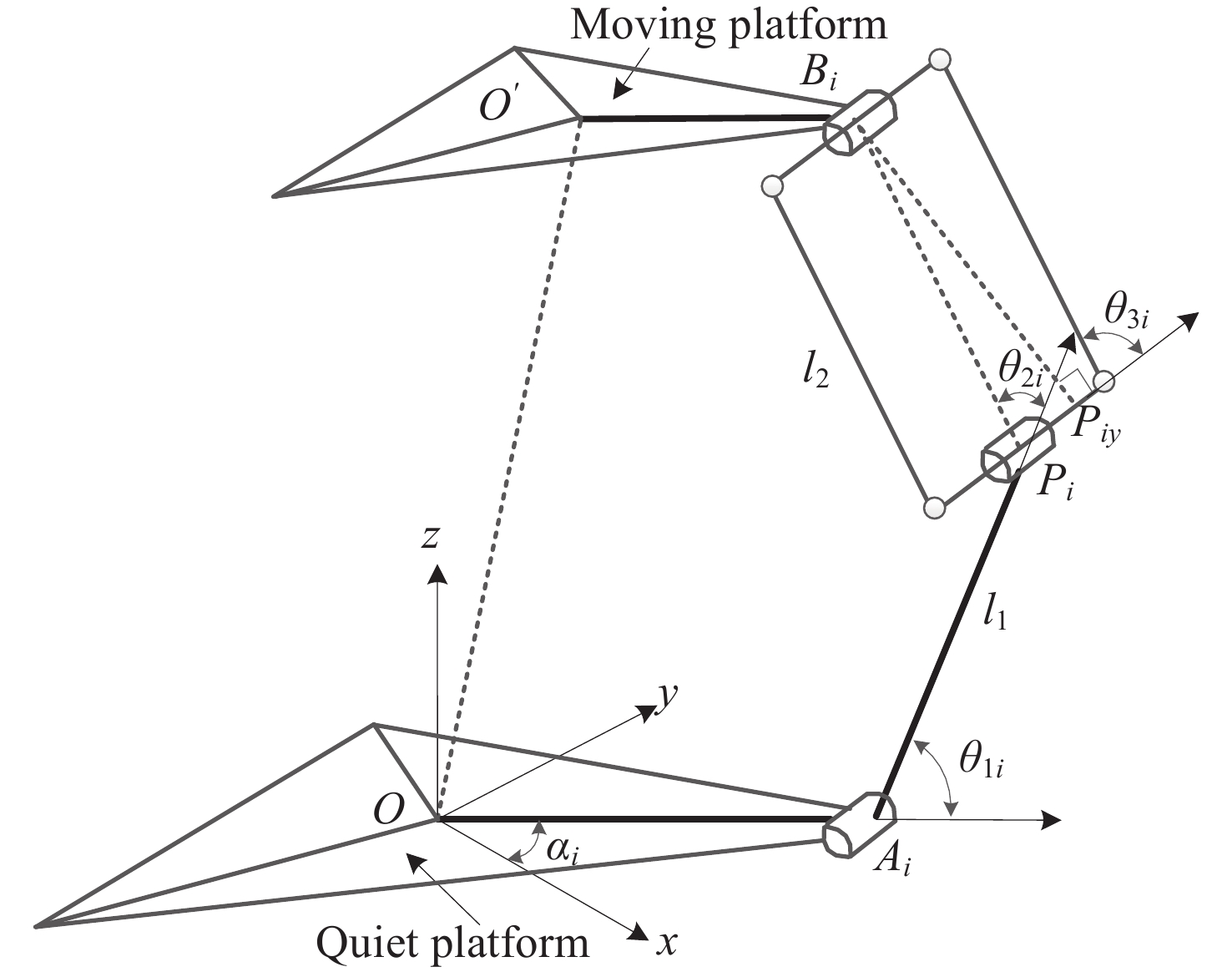
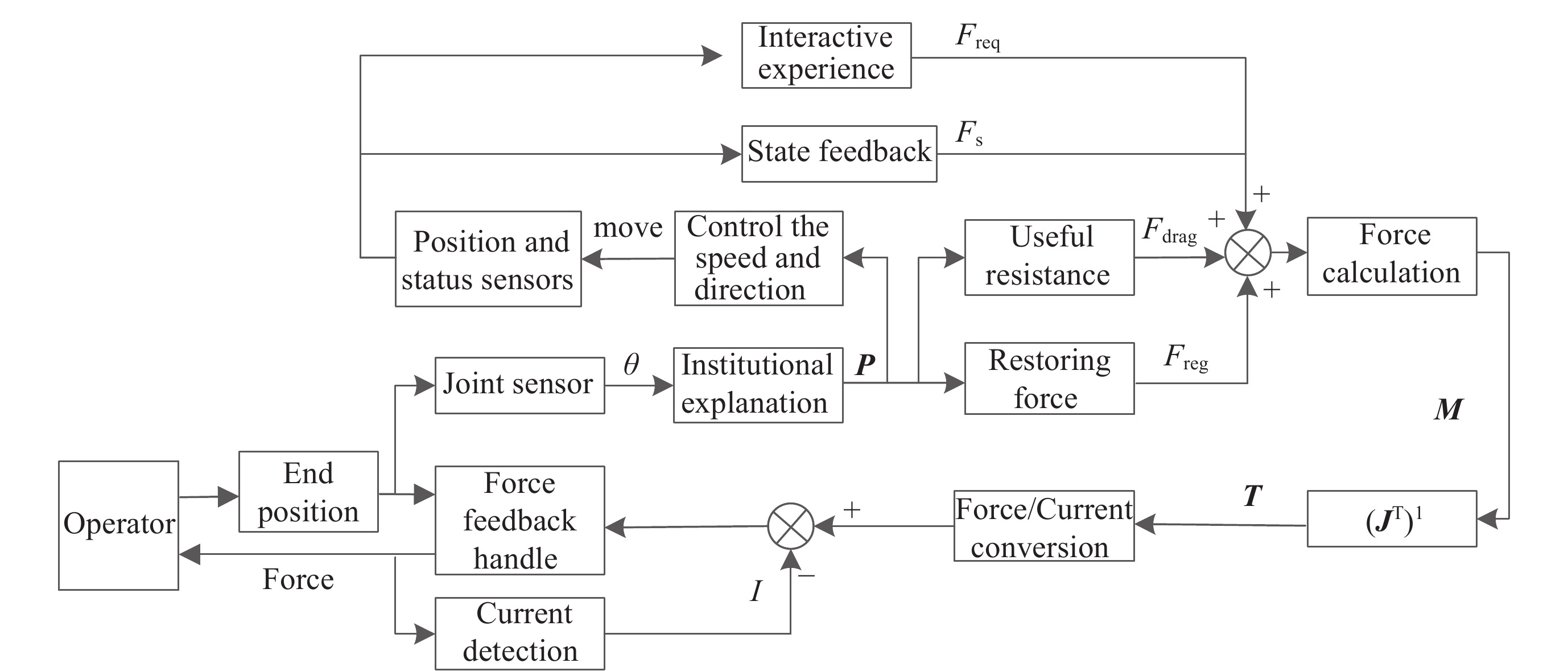
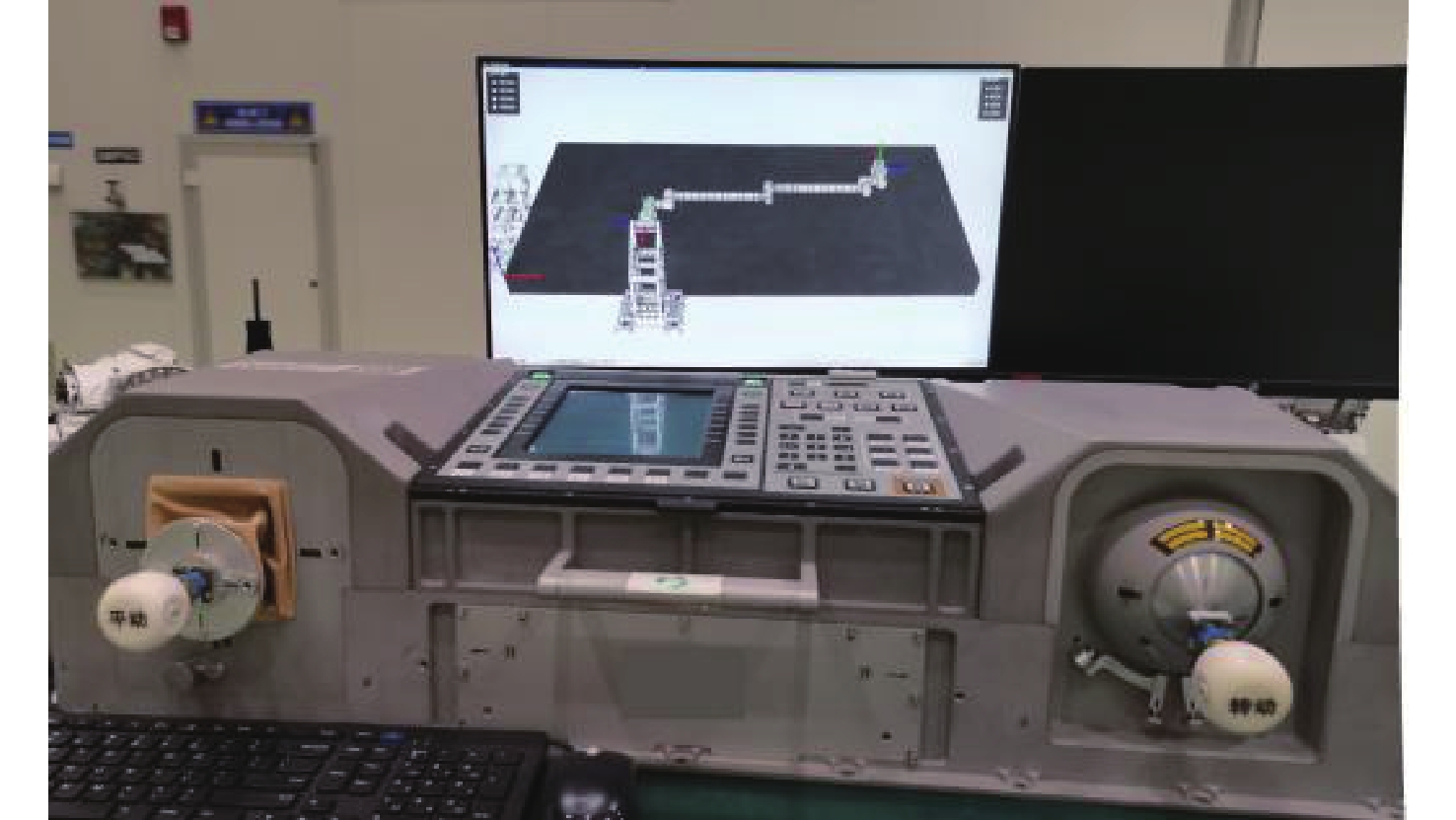
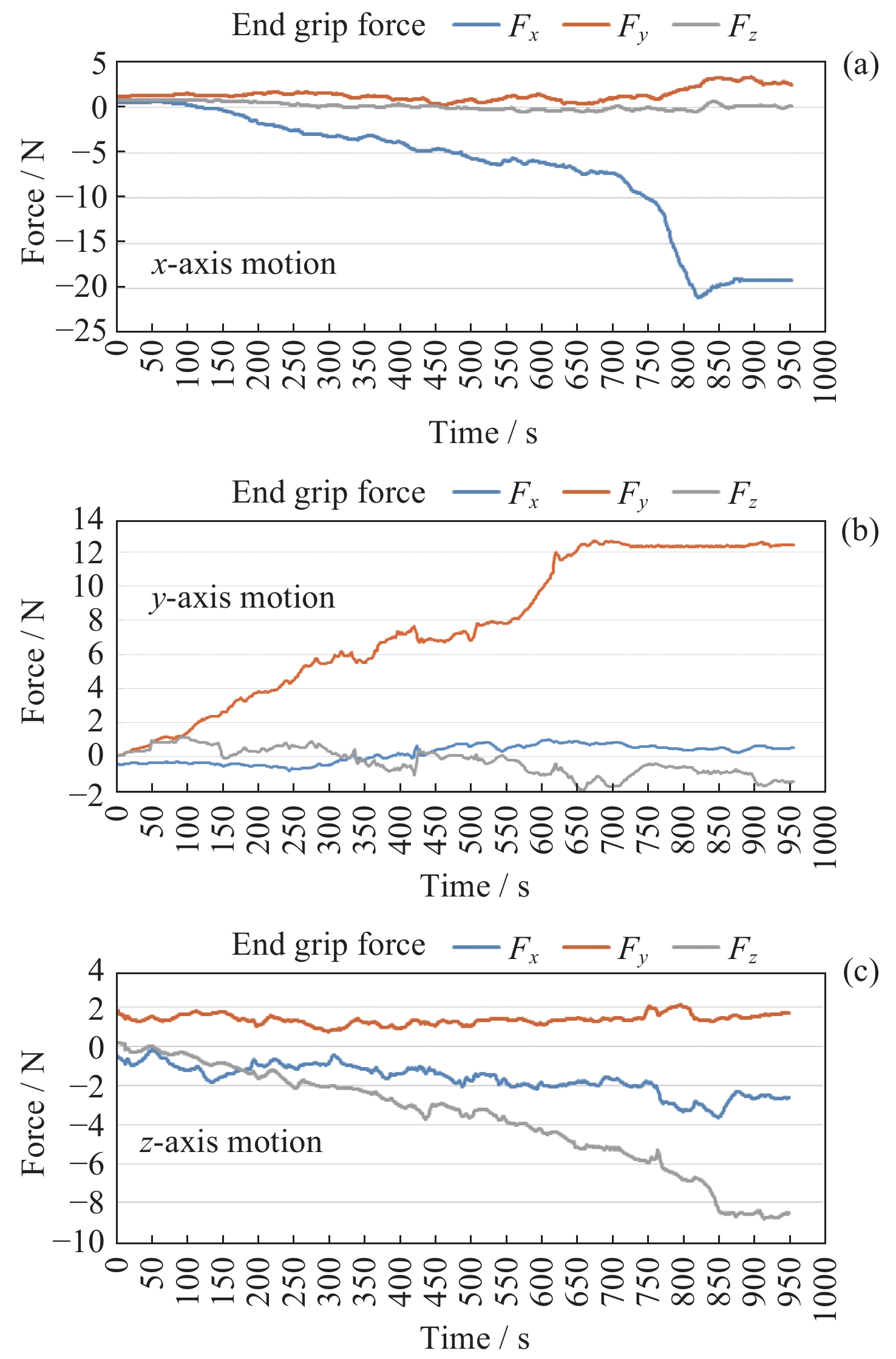
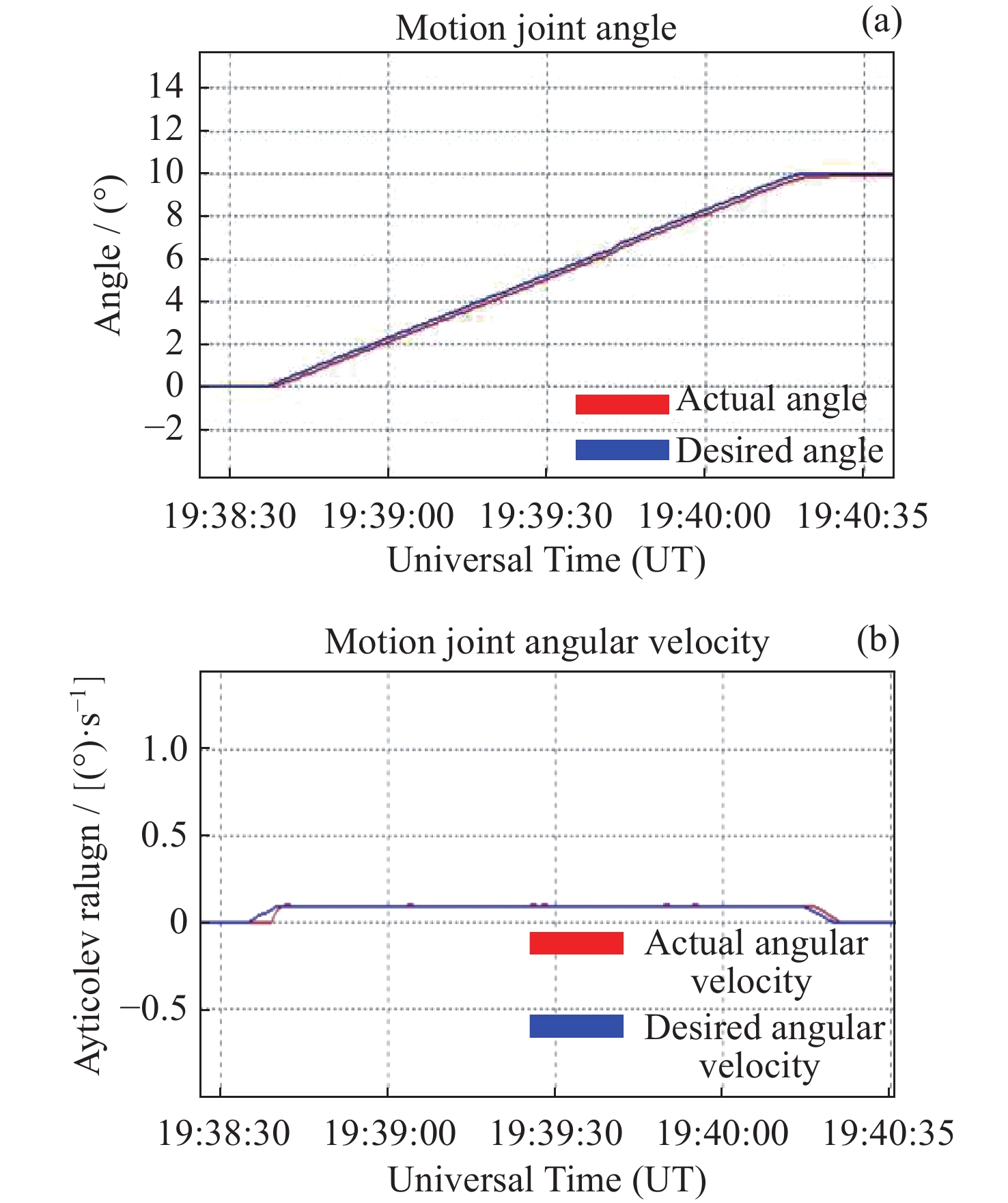
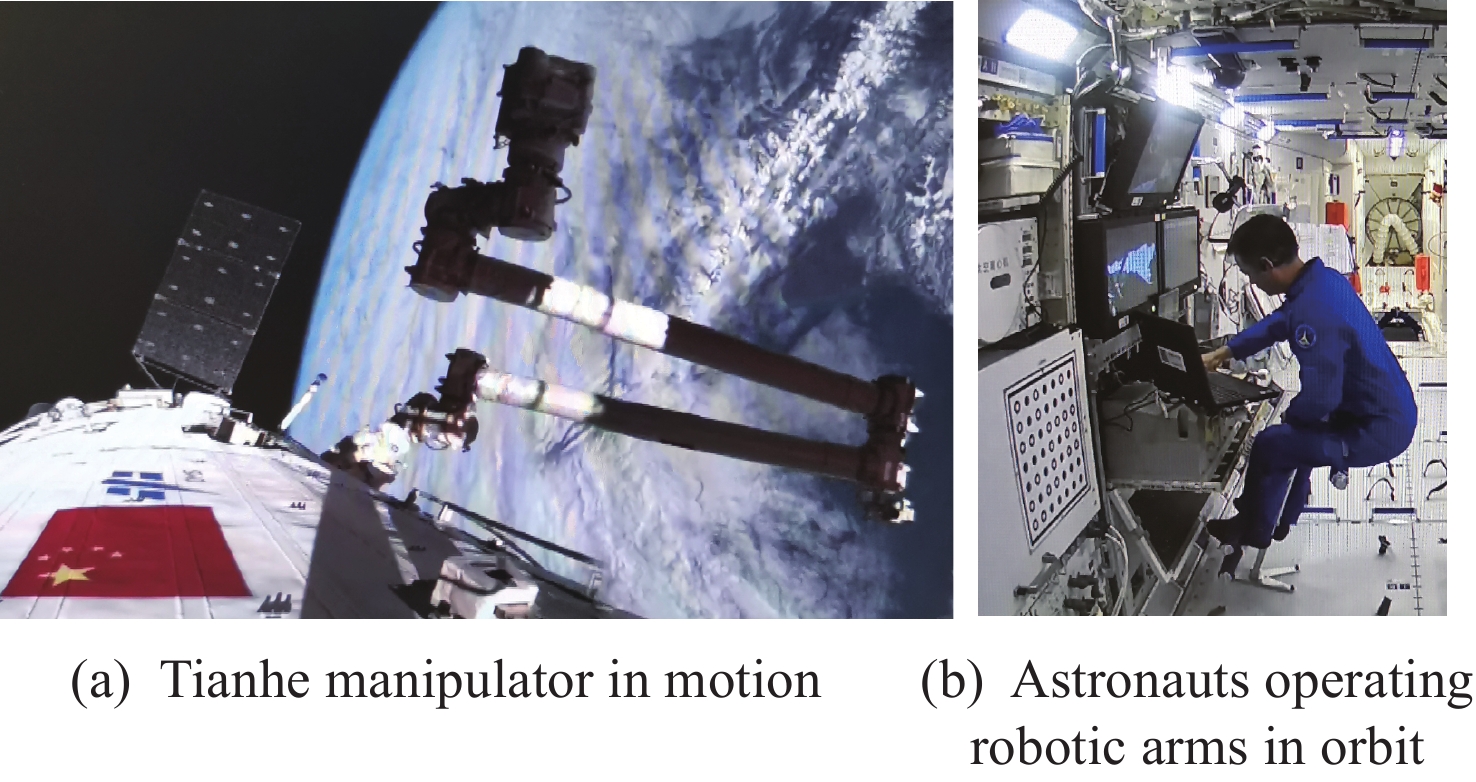
As an important platform for the construction and on-orbit operation of space station, the space manipulator operating subsystem is the first independently developed large-scale space robotic system for aerospace engineering applications in China. The space robot arm has 14 degrees of freedom under the combination of the two arms, with large motion inertia, high operating precision, and support for multi-mode work. In this paper, according to the characteristics of space manipulator on-orbit mission, a space manipulator operation subsystem is established, which is supporting long-term on-orbit and multi-mode operation. The operation subsystem is composed of manipulator console, virtual simulation platform and display, which can meet the requirements of multitasking. This paper provides a summarize overview of the architecture, working mode, and technical characteristics of the operation subsystem, and focuses on analyzing the system bus structure, multimodal human-computer interaction technology, and force perception rendering algorithms of the operation subsystem. According to the ground test and on-orbit work, the verification of space manipulator operation subsystem is obtained, which provides valuable experience and data for space manipulator operation mission. The results show that the space manipulator operating subsystem can better carry out on-orbit management of the space robotic arm, monitor the whole process of it, as well as ground and on-orbit remote control and manipulation; the application of force perception rendering technology can better support the fine manipulation of the space robotic arm end and joints; the virtual simulation platform can effectively simulate the on-orbit tasks of the space robotic arm and simulate the pre-task rehearsal and training of the support task. The space manipulator operating subsystem has accumulated experience and data to support space robotic arm mission implementation.
QIU Xin’an, MA Dongtao, TIAN Licheng, HU Yuqian, WU Zhihong, ZENG Zhenglin, WEI Zhiming, DUAN Fuwei, XIAO Qiang, MA Hongjiong, SHI Wei. Design and Implementation of Space Manipulator Operating Subsystem (in Chinese). Chinese Journal of Space Science, 2024, 44(5): 939-947. doi: 10.11728/cjss2024.05.2023-0081.